Обзор систем. Современное автомобилестроение огромными темпами внедряет инновационные технологии в системах управления. Общая тенденция в области автоматизации электромобилей состоит в замене традиционной централизованной системы управления на распределенную систему управления путем соединения блоков управления интеллектуальных датчиков и исполнительных механизмов. Это вызвано ростом числа проводов связи, увеличением количества соединений, сложностью диагностирования автомобилей и снижением надежности. Увеличивающееся применение электронных систем управления электромобилей с обратной и без обратной связи требует, чтобы индивидуальные электронные блоки управления работали в сети друг с другом.
Обмен информацией между системами уменьшает общее количество необходимых датчиков и улучшает управление отдельными системами. Интерфейсы систем передачи информации, проектируемые для применения в автомобилях, могут быть подразделены на:
— обычные интерфейсы;
— шина LIN (локальная сеть воздействия) — это простая последовательная однопроводная шина для автомобильных применений;
— шина SMBus (System Management Bus — шина системного управления) является двухпроводным интерфейсом для обмена данными между различными системными компонентами;
— I²C (IIC, англ. Inter-Integrated Circuit) — последовательная асимметричная шина для связи между отдельными приборами;
— UART (англ. Universal Asynchronous Receiver-Transmitter,) универсальный асинхронный приёмопередатчик — узел ЭБУ, предназначенный для организации связи с другими устройствами.
— интерфейсы последовательной двухпроводной передачи данных, то есть сеть контроллеров (CAN);
— AVC- LAN — локальная мультиплексная сеть для передачи аудиовизуальных и других данных.
BEAN (Body Electronics Area Network) — шина данных кузовной электроники;
— широкополосные шины передачи данных с временным разделением каналов (шина FlexRay);
— медиа-ориентированная шина транспорта (МОSТ) использует последовательную круговую структуру и может быть организована как электрическим проводным, так и оптическим способом передачи данных;
— Ethernet (эфирная сеть) — семейство технологий пакетной передачи данных между устройствами, может быть, как проводная, так и оптическая;
— Bluetooth — беспроводная персональная сеть (Wireless personal area network);
— Wi-Fi — технология беспроводной локальной сети с устройствами;
— Мультиплексная система передачи данных используются несколько протоколов передачи данных, например, (CAN, LIN и AVC-LAN), что позволяет реализовать конфигурацию электропроводки, соответствующую современным требованиям и др.
Обычная передача данных (интерфейсы). Обычная передача данных в электромобиле характеризуется тем, что каждый сигнал имеет свой собственный канал связи (провод). Тем самым с каждой дополнительной информацией возрастает также число проводов и количество контактов на блоке управления, поэтому подобный тип передачи информации оправдывает себя только в случае ограниченного объема передаваемых данных.
Увеличение обмена данными между электрическими компонентами электромобиля уже достигли таких объемов, что дальнейшие попытки управления через обычные интерфейсы уже не удовлетворяют современные системы управления, поэтому стали применяться шины передачи данных. При такой передаче блок управления АВS преобразует любую информацию датчика скорости вращения в последовательность импульсов. При этом различаются только состояния «напряжение высокое» и «напряжение низкое». Даже если последовательность импульсов будет принята в искаженном виде, при цифровой передаче с большой вероятностью сигнал восстанавливается (регенерируется) (рис. 6.5, б).
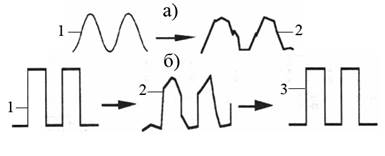
1 – отправленный сигнал; 2 – принятый сигнал; 3 – регенерированный сигнал; а – аналоговая передача; б – цифровая передача
Шина LIN была разработана для удовлетворения потребностей устройств системы комфорта. LIN – это сокращение от Local Interconnect Network (локальная коммутируемая сеть). Local Interconnect означает, что все блоки управления находятся в пределах одного ограниченного модуля (например, крыши или климат-контроля) (рис. 6.6).

Шина LIN используется в тех случаях, когда применение CAN шины дорого, не требуется высокая скорость передачи и объем передаваемых данных небольшой (как правило, в системах комфорта).
Типичные области применения:
— дверной модуль с дверным замком;
— приводы стеклоподъемников;
— регулировка боковых зеркал заднего вида;
— система кондиционирования (передача сигналов от элемента управления, активация вентилятора свежего воздуха).
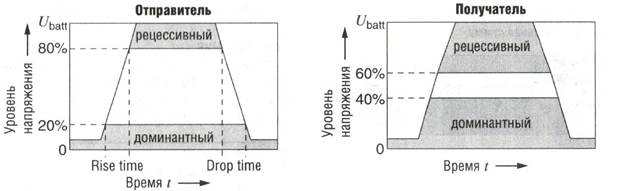
Шина LIN представляет собой неэкранированный однопроводный кабель. Уровень шины может принимать два логических состояния. Доминантный уровень соответствует напряжению приблизительно 0 В (масса) и представляет собой логический 0. Рецессивный уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Из-за наличия разных вариантов электрических цепей уровни могут быть разными. Определение допусков на передачу и прием в области рецессивных и доминантных уровней обеспечивает стабильную передачу данных. Диапазоны допусков шире на приемном конце (получатель) (рис. 6.7), чтобы действительные сигналы тоже можно было получать, несмотря на излучаемые помехи.
Скорость передачи по шине LIN ограничена величиной 20 кбит/с. Это компромисс между большой крутизной фронта импульсов, необходимой для синхронизации ведомых устройств, с одной стороны, и небольшой его крутизной, необходимой для улучшения ЕМС — с другой. Рекомендуемая скорость передачи составляют 2400, 9600 и 19200 бит/с. Минимально допустимая скорость составляет 1 кбит/с.
Максимальное количество узлов не регламентируется в спецификации LIN. Теоретически оно ограничено количеством доступных идентификаторов сообщений. Возможности линии и узла и крутизна фронта импульсов ограничивают сочетание длины и количества узлов сети LIN; рекомендуется не более 16 узлов.
Доступ к шине LIN обеспечивается на основе доступа «ведущий-ведомый». В сети имеется ведущее устройство, инициирующее каждое сообщение. Ведомое устройство имеет возможность ответить. Обмен сообщениями происходит между ведущим и одним, несколькими либо всеми ведомыми устройствами.
Шина SMBus (System Management Bus — шина системного управления) является двухпроводным интерфейсом для обмена данными между различными системными компонентами. Основное назначение интерфейса — управление подсистемой электропитания и мониторинг оборудования. Шина SMBus создана на базе последовательного интерфейса I2C. SMBus работает на скоростях до 100 кбит/с.
Шина I2C представляет собой модификацию последовательного протокола обмена данными, способную в обычном «быстром» режиме передавать последовательные 8-битные данные на скоростях от 100 до 400 кбит/с. Процесс обмена данными реализуется по двум проводам (не считая общего провода): линия данных SDA и линия синхронизации SCL. Каждое из соединенных с шиной устройств имеет свой уникальный адрес, определяется по нему, и, в соответствии с назначением устройства, может работать как приемник либо как передатчик. При передаче данных эти устройства способны быть ведущими (master) или ведомыми (slave). Ведущим выступает то из устройств, которое начинает передачу данных и генерирует синхронизирующие сигналы на линии SCL. Ведомым, по отношению к ведущему, считается при этом устройство-адресат. Пример реализации шины I2C показан на рис. 6.8.
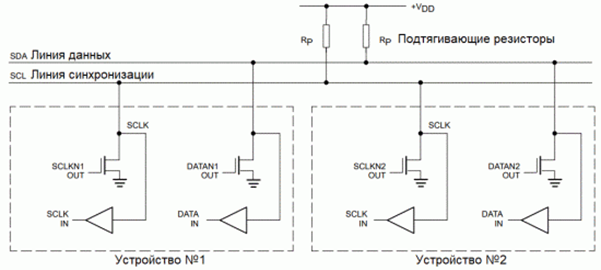
В каждый момент действия шины I2C только одно устройство может выступать ведущим, оно формирует на линию SCL сигнал. Ведущий может быть либо ведущим-приемником, либо ведущим-передатчиком. Шина допускает несколько разных ведущих, накладывая ограничения на особенности формирования управляющих сигналов и контроля состояния шины; это значит, что несколько ведущих могут начать передачу в один момент, но конфликты такого рода устраняются благодаря арбитражу, то есть способу поведения ведущего при обнаружении факта, что шина занята другим ведущим.
Последовательный асинхронный интерфейс UART. Последовательный интерфейс использует 2 основных провода для передачи данных, по которой биты информации передаются друг за другом последовательно. При последовательной передаче каждый информационный бит должен сопровождаться импульсом синхронизации — стробом. Если импульсы синхронизации передаются от одного устройства к другому по выделенной линии, то такой интерфейс называют синхронным, в этом случае генератор синхронизации располагается на стороне устройства инициирующего передачу. Если же приемник и передатчик не связаны синхроимпульсами, то такой интерфейс называется асинхронным. В таком случае обязательно вместе с передаваемой информацией требуется передача стартовых и стоповых битов, а зачастую и бита четности. Основные рабочие линии: передающая линия – TXD (Transmitted Data) и принимающая RXD (Received Data). Эти линии задействованы при передаче без аппаратного управления потоком данных. При аппаратном потоке задействованы еще дополнительные интерфейсные линии (DTS, RTS и пр.). Наибольшая скорость составляет 115200 бит / с. Пример передачи в асинхронном режиме показан на рис. 6.9.
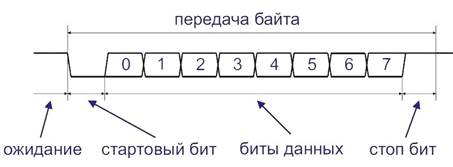
Каждый бит каждого байта передаётся в равный отведённый промежуток времени (фактически, тайм-слот). Стандартным размером данных в посылке является 8 байт, но помимо данных каждый пакет несёт и служебную информацию, а именно:
- стартовый бит (обязателен);
- стоповый бит (также обязателен, возможно использование 1, 1.5, 2 стоповых битов);
- бит чётности (необязателен).
Последовательная передача данных (CAN). В связи с возросшими требованиями передачи информации в автомобильных системах управления, вместо обычной электропроводки в современных автомобилях все более широкое распространение находят электронные цифровые шины данных CAN (Controller Area Network). Цифровая передача данных значительно надежнее обычной аналоговой – шина лучше защищена от помех, контакты надежнее изолированы от внешних воздействий.
CAN-шина облегчает диагностику и ремонт вышедших из строя компонентов. Универсальная проводка подходит и для разных комплектаций одного автомобиля – дополнительные устройства просто подключаются к нужным разъемам.
Данные передаются по обоим проводам одновременно в противофазе, т.е. сигнал на первом проводе представляет собой перевернутый (можно сказать зеркальное отражение) сигнал, передаваемый по второму проводу. Второй провод используется для проверки правильности переданной модулем управления информации и для самоконтроля модуля (постоянно проверяется соответствие 2 х сигналов).
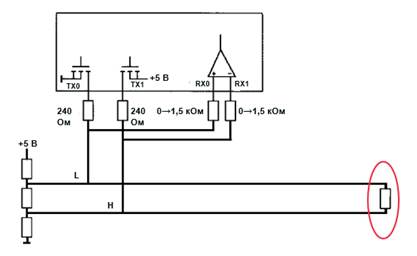
Все связанные через шину CAN блоки управления подключаются к ней параллельно. Один из проводов шины CAN называется высоким (CAN_High), а другой — низким (CAN_Low). Два невзаимозаменяемых скрученные между собой провода образуют пару (Twisted Pair) (рис. 6.10).
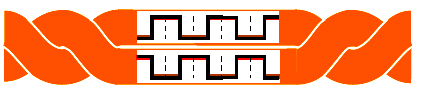
Скручивание проводов производится для того чтобы ослабить помехи электромагнитного характера, излучаемые различными силовыми цепями электромобиля. Источниками помех на электромобиле являются узлы или системы, работа которых сопровождается размыканием-замыканием электрических цепей. Другие источники помех – это устройства, излучающие электромагнитные волны, например – мобильные телефоны или радиопередатчики. Такие источники помех могут нарушить или исказить передачу данных по шине CAN. Скручивание позволяет также устранить излучение самой шины, способной создать помехи работе других чувствительных устройств.
По проводу «CAN High» информация передается в виде электрических сигналов напряжением от 2,5 В до 3,5 В, а по проводу «CAN Low» — напряжением от 1,5 до 2,5 В (рис. 6.11). Разность напряжений, равная нулю, дает уровень логического нуля, а разность напряжений в 2 В — уровень логической единицы. Благодаря этому сумма напряжений в любой момент остается постоянной, и эффект электромагнитного поля на обоих проводах передачи данных взаимно уничтожается.
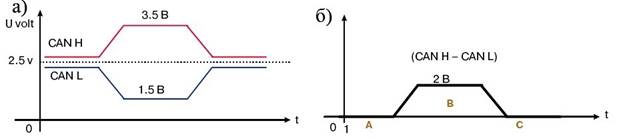
А, С – логический уровень = 0; B – логический уровень = 1;
а – напряжение; б – разность напряжений
CAN – мультимастерная шина, то есть без центрального управляющего устройства. Все подключаемые электронные блоки разных систем (или контроллеры) практически равноправны – любой имеет доступ к передаваемым данным и может сам передавать.
CAN-шина относится к типу последовательных шин. Передача данных в шине CAN выполняется по протоколу в виде обмена сообщениями между блоками управления через очень короткие промежутки времени (от 10 до 100мс).
Протокол состоит из последовательности бит информации, передающихся друг за другом. Бит (вit) сокращение английского выражения «binary digit» – бинарное значение, двоичная цифра. Бит – минимальная единица передачи информации. В электронике биту может быть присвоено одно из двух возможных значений: «0» что соответствует состоянию «выкл» или «нет», а «1» соответствует состоянию «вкл» или «да».
Если бит имеет значение «выключено» (логический «0»), то говорят о рецессивном состоянии. Если бит имеет значение «включено» (логическая единица, «1»), то говорят о доминантном состоянии.
Число бит в протоколе передачи данных зависит от размера поля данных. Данные передаются последовательно бит за битом как бусины по нитке, и таким же образом принимаются. Биты составляют отдельные поля (рис. 6.12) из них складываются кадры – основные информационные единицы.
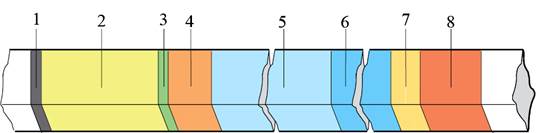
1 – начало кадра (1 бит); 2 – арбитражное поле (11 бит); 3 – не используемое поле (1 бит); 4 – поле управления (6 бит); 5 – поле данных (64 бита); 6 – поле CRC (16 бит); 7 – поле ACK (2 бита); 8 – конец кадра (7 бит)
Начало кадра 1 обозначает начало протокола передачи данных.
Арбитражное поле 2 используется для обозначения приоритета протокола передачи данных. Например, если двум блокам управления требуется отправить сообщения одновременно, первым отправляет сообщение блок управления с более высоким приоритетом. Чем меньше значение в арбитражном поле, тем более высокий имеет приоритет электронный узел. Кроме того, оно используется для идентификации электронного блока управления.
В поле управления (контрольное поле) 4 в виде кода записывается количество байт информации в поле данных Чаще всего используется 8 байт. Этим обеспечивается возможность для каждого приемника проверить, были ли получены все необходимые данные.
В поле данных 5 передаются элементы данных, являющиеся важными для других блоков управления. В этом поле содержится основная информация: от 0 до 64 бит (от 0 до 8 байт).
Поле CRC 6 используется для обнаружения ошибок в процессе передачи данных и является контрольная суммой значений всех байт. Приемник пересчитывает значения в полученных байтах и сравнивает с контрольной суммой. Если значения совпадают, то прием выполнен правильно, и данные могут быть использованы в дальнейшей обработке. В противном случае ожидается следующее сообщение.
Поле ACK 7 содержит сигнал приемника передатчику о том, что протокол данных был успешно выполнен. В случае обнаружения ошибки информация об этом немедленно передается передатчику, после чего отправка сообщения повторяется.
Конец кадра предназначен для проверки передатчиком протокола данных и отправки приемнику подтверждения о его безошибочном выполнении. В случае обнаружения ошибки передача данных немедленно прекращается, а затем выполняется повторно. После этого протокол передачи данных считается выполненным.
Один кадр может включать несколько параметров.
Некоторые кадры выдаются периодически (например, кадр, генерируемый ЭБУ подушек безопасности, выдается в случае удара, происходит разблокировка замков дверей и запрещается блокировка рулевой колонки.
Примером идентификационного кода послания может быть частота вращения вала электродвигателя, которая представляется в двоичной форме, т. е. как последовательность нулей и единиц или бит (рис. 6.13). Например, значение частоты вращения вала электродвигателя 1800 об/мин может быть представлено как двоичное число 00010101.
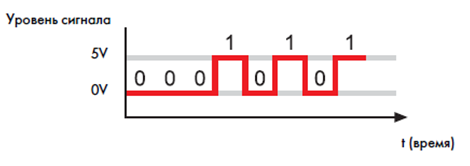
При передаче сигналов каждое число в двоичном представлении преобразуется в поток последовательных импульсов (бит). Эти импульсы поступают через провод TX (передающий провод) на вход трансивера (усилителя). Он преобразует последовательность поступающих с модуля системы CAN двоичных сигналов (на логическом уровне) в электрические импульсы напряжения и наоборот, которые затем последовательно передаются на провод шины.
Процесс начинается с измерения частоты вращения посредством датчика 4, соединенного с блоком управления двигателем (рис. 6.14). Измеряемое значение периодически вводится во входное запоминающее устройство 8 микроконтроллера и по шине CAN передается на другие блоки управления, например, на блок управления в комбинации приборов. В связи с этим информация о частоте вращения копируется в выходном запоминающем устройстве 9 блока управления двигателем. Из выходного запоминающего устройства информация поступает в выходной почтовый ящик 6 модуля системы CAN. При поступлении актуальных данных в почтовый ящик вырабатывается специальный сигнал, символом которого является поднятый флаг 7.
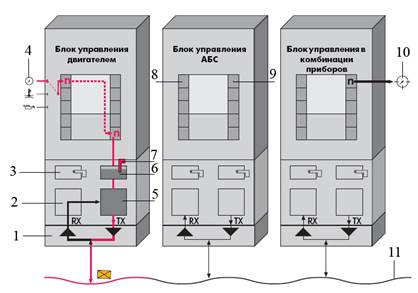
(на примере частоты вращения вала электродвигателя):
1 – трансивер; 2 – зона приема данных; 3 – входной почтовый ящик; 4 – датчик частоты вращения вала электродвигателя; 5 – зона передачи данных; 6 – выходной почтовый ящик; 7 – символ сигнала поступления актуальных данных в почтовый ящик; 8 – входное запоминающее устройство; 9 – выходное запоминающее устройство; 10 – тахометр; 11 – шина CAN; TX – передающий провод; RX – принимающий провод
Выполнение процесса запуска завершается выдачей задания на передачу данных модулю системы CAN блок управления двигателем.
Прием послания производится в два этапа:
- Этап 1 проверка послания на содержание ошибок (на уровне контроля).
- Этап 2 проверка пригодности послания (на уровне признания).
Трансивер 1 представляет собою приемопередающее устройство, одновременно выполняющее функции усилителя. Он преобразует последовательность поступающих с модуля системы CAN двоичных сигналов (на логическом уровне) в электрические импульсы напряжения и наоборот. Связь трансивера с модулем системы CAN осуществляется посредством проводов TX (передающий провод) и RX (принимающий провод).
Провод RX соединен с шиной CAN через усилитель. Он позволяет постоянно «прослушивать» сигналы, передаваемые через шину.
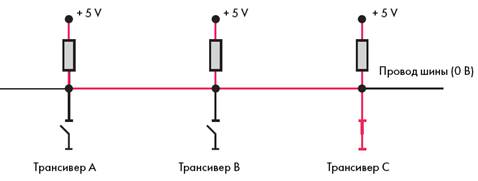
Особенностью подключения провода TX к шине является соединение через каскад с открытым коллектором. Благодаря этому могут быть реализованы два состояния шины (рис. 6.15):
Состояние 1: пассивное, уровень шины равен 1, провод шины соединен с источником тока через высокоомное сопротивление, при этом транзистор закрыт (выключатель разомкнут);
Состояние 0: активное, уровень шины равен 0, шина замкнута на «массу» через низкоомное сопротивление, при этом транзистор открыт (выключатель замкнут);
При приеме сигналов трансивер преобразует импульсы напряжения в последовательности бит и передает их через провод RX (приемный провод) на блок управления. В блоке управления последовательности двоичных сигналов вновь преобразуются в данные посланий. Например, двоичное число 00010101 преобразуется в частоту вращения 1800 об/мин. Передаваемое послание может быть принято каждым из блоков управления.
Этот принцип передачи данных называют широковещательным, так как он подобен принципу работы широковещательной радиостанции, сигналы которой принимаются каждым пользователем радиосети. Контроллеры отслеживают информацию: по принципу «слушаю всех», то есть каждый читает все проходящие по шине кадры, но принимает лишь необходимые ему данные. В данной ситуации, например, блок управления АБС пропустит ненужные сигналы от датчика частоты вращения вала электродвигателя, а считает только необходимые сведения о положении педали «Ход» в свою очередь отправит информацию о частоте вращения колес автомобиля и т.д.
Другой принцип общения на шине позаимствован из компьютерных сетей и называется «один говорит – остальные слушают». Единовременно передавать данные может только один контроллер. В соответствии с принятой для шины CAN стратегией ситуация регулируется следующим образом.
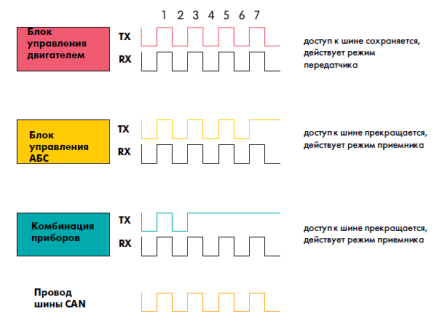
Если шина занимает рецессивное состояние, то она готова к передаче данных. Блок управления, который готов к передаче обнуляет сигнал на проводе TX и затем должен произвести передачу данных через шину (рис. 6.16). Каждый из активных блоков управления начинает процесс передачи данных с ввода идентификатора. Число нулей в головной части идентификатора определяет ранг приоритета послания. Передача посланий производится в порядке, соответствующем их рангу. При этом действует правило: чем меньше число, обозначающее идентификатор, тем важнее послание. Этот способ оценки называют арбитражем. Этот термин является производным от слова арбитр или спортивный судья.
В этом случае состояние шины становится доминантным. Все блоки управления следят за состоянием шины, считывая с нее данные через провод RX (приемный провод).
Приоритет передачи информации определяется по важности выполняемых функций. Соблюдение безопасности является главным пунктом для определения очередности.
Теоретически шину можно сделать любой длины и разместить на ней сколько угодно контроллеров. Однако на практике ограничивают и то, и другое. Это связано с тем, что скорость распространения сигналов не бесконечна, а все электронные блоки должны получать информацию одновременно.
Поэтому быстродействующие шины делают короткими – длиной не более 10 м, чтобы получить предельную скорость 2 Мбит/с.
При скорости 1 Мбит/с, максимальная протяженность длины кабеля шины около 40 метров. Это связано с тем, что арбитражная схема требует, чтобы фронтальная волна сигнала могла достигнуть удаленные устройства и вернуться обратно, прежде чем будут переданы данные.
На одной шине устанавливают обычно не более 64 контроллеров, однако для 11 битной идентификационной системы доступно подключение до 255 блоков.
Для увеличения передачи объема информации прокладывают несколько независимых цепей, потому что не все системы требуют максимального быстродействия CAN. Для быстроизменяющихся параметров электромобилей чаще всего используют шины данных со скоростью 500 Кбит/с…1Мбит/с.
Менее быстрые и важные приборы система комфорт или информационно-командной система (радио, монитор на центральной консоли, система навигации и кондиционирования) завязаны на другую шину со скоростью 100…250 Кбит/с.
Для остальных «медленных» устройств система комфорт (дверных замков, систем освещения, стеклоподъемников) служит третья шина с скоростью –50… 100 Кбит/с.
Вместо ключа зажигания в электромобилях, оборудованных CAN-шинами, используют электронный брелок, который взаимодействует с блоком управления двигателем через цифровую шину.
AVC– LAN – локальная мультиплексная сеть для передачи аудиовизуальных и других данных. Скорость передачи данных составляет17 кбит/с, включает 2 линии. Отдаленно напоминает шину CAN, однако имеет отличный протокол обмена информацией, использует экранированные провода. Пример схемы подключения приведен на рис. 6.17.
BEAN (Body Electronics Area Network) – шина данных электронная управляемых компонентов кузова. Блок – схема системы приведена на рис. 6.18.

Особенностью топологии этой сети является кольцо-шина. Данные передаются в цифровом виде по одному проводу. Контакты MPX1 и MPX2 на блоках запаралелены — это «вход» и «выход» кольца. Скорость передачи составляет 10 кбит/с с уровнем сигнала: 12v = 1, 0v = 0. Данные передаются кадрами. Данная шина обладает свойствами шин LIN и MOST.
Шина FlexRay. Возросшие требования к скорости передачи и безопасности данных требуют применения широкополосных шин передачи данных с временным разделением каналов (временным управлением). Для сравнения: шина CAN представляет собой событийно-управляемую шину данных.
FlexRay представляет собой последовательную, детерминистическую и устойчивую к сбоям шину передачи данных для применения в электромобиле. Скорость передачи данных по шине FlexRay составляет 10 Мбит/с, что в двадцать раз превышает скорость передачи по высокоскоростной шине CAN (500 кбит/с).
Другой важной особенностью является гарантированное время реакции или латентный период реагирования, который представляет собой время, которое требуется сообщению на прохождение от отправителя до получателя. В связи с этим говорят также о детерминистической (предопределённой, регламентированной) передаче. Это означает, что данные поступают к адресату или адресатам к строго определённому или предварительно заданному моменту времени (возможность применения в режиме реального времени).
В отличие от шины CAN, в случае шины FlexRay для активации шины требуется не менее двух блоков управления. Эти блоки управления именуются блоками управления холодного запуска (KS). Их число для каждой сети FlexRay ограничено максимум тремя блоками.
Для обеспечения обмена данными с временным разделением каналов, в пределах этой конкретной сети передачи данных с помощью синхронизации нескольких блоков управления задаётся единая точка отсчёта времени. Благодаря синхронизации внутренних часов блоков управления в системе FlexRay, выход из строя отдельных блоков управления не оказывает влияние на коммуникационные характеристики остальных блоков управления.
Обычно синхронизацию шины FlexRay обеспечивают четыре блока управления, называемые синхронизирующими блоками управления. Если в системе шины FlexRay имеется более четырёх блоков управления, то остальные блоки синхронизируются по точке отсчёта времени, заданной синхронизирующими блоками. Поскольку эти дополнительные блоки управления интегрируются в работающую, синхронизированную систему, их называют интеграционными блоками управления.
Шина FlexRay имеет следующие особенности:
● электрическая двухпроводная шина данных;
● скорость передачи данных: макс. 10 Мбит/с;
● комбинированная топология шины;
● возможность применения в режиме реального времени;
● обеспечивает распределённое управление и применение в системах, связанных с обеспечением безопасности;
● синхронная передача данных.
Шина FlexRay двухпроводная. Плюсовой провод (BP) обозначаются красным цветом, минусовой (ВМ) – синим. Уровень напряжения на обоих проводах колеблется в диапазоне от минимума в 2,2В до максимума в 2,8В (рис. 6.19) (для сравнений в высокоскоростной шине CAN от 1,5В до 3 В). Уровень разностного напряжения составляет не менее 600 мВ (в высокоскоростной шине CAN 2В).
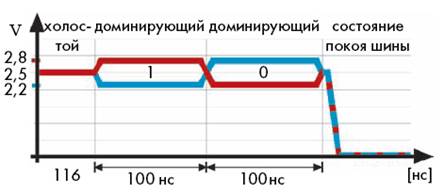
FlexRay работает с тремя состояниями сигнала:
● «холостой» — уровень напряжения обоих проводов шины рецессивный и составляет 2,5В (режим холостого хода). Рецессивный означает, что уровень напряжения может быть превышен (перезаписан) другим блоком управления;
● 0 — провод BP имеет низкий, а провод BM — высокий доминирующий уровень напряжения. Доминирующий означает, что этот уровень напряжения не может быть превышен (перезаписан) другими блоками управления;
● 1 — провод BP имеет высокий, а провод BM — низкий доминирующий уровень напряжения.
При таких параметрах уровня напряжения время передачи бита составляет 100 наносекунд (нс). (для сравнений в высокоскоростной шине 2000 нс).
Шина MOST. Шина MOST представляет шину последовательной передачи данных (аудио, видео, голосовые сигналы, данные) по оптическому кабелю (рис. 6.20). С точки зрения физического исполнения в случае шины MOST речь идёт о кольцевой структуре (топологии) сети. Шина MOST может включать до 64 устройств.
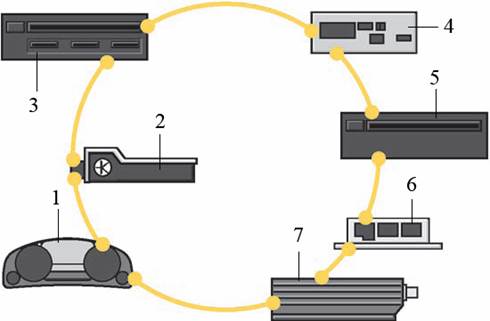
1 – ЭБУ в комбинации приборов; 2 – диагностический интерфейс шин данных; 3 – ЭБУ информационной электронной системы; 4 – ТВ-тюнер; 5 – DVD чейнджер; 6 – головное устройство аудиосистемы; 7 – ЭБУ цифровой аудиосистемы
Шина MOST имеет следующие особенности:
● оптическая шина передачи данных;
● скорость передачи данных: 21,2 Мбит/с;
● кольцевая топология шины;
● адресноориентированная передача сообщений определённым адресатам;
● циклическая и управляемая событиями передача данных;
● высокая помехозащищённость.
С помощью оптической шины MOST обмен данными между абонентами шины происходит в цифровом формате.
У металлических проводников создаются поля вокруг любого проводника, по которому проходит электрический ток (рис. 6.21). Поэтому проложенные параллельно или перекрещивающиеся проводники тока создают взаимные помехи. Помехи создаются также электромагнитными волнами, генерируемыми, например, мобильным телефоном. При использовании волоконно-оптической связи такие помехи отсутствуют.
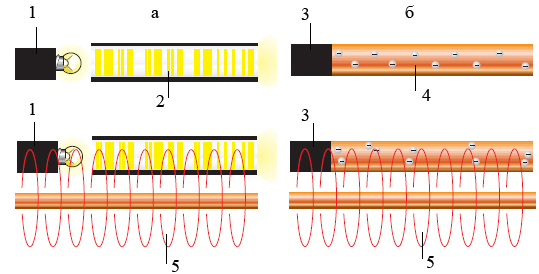
и металлический (б) проводники:
1 – цифровая информация; 2 – импульсы света в оптическом кабеле; 3 – аналоговая или цифровая информация; 4 – электроны в металлическом проводнике; 5 – электромагнитное поле проводника
Основными компонентами волокно-оптических систем являются светодиоды и фотодиоды, составляющие приемопередатчик; трансивер; световод; микропроцессор (рис. 6.22).
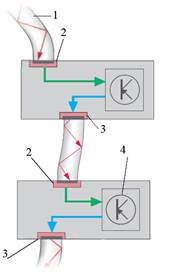
1 – световод; 2 – фотодиод; 3 – светодиод; 4 – трансивер
Светодиод предназначен для преобразования сигнала по напряжению в световой сигнал. Длина волны выработанных световых волн составляет от 650 nm и их видно, как красный свет.
Фотодиод предназначен для преобразования световых волн в сигналы по напряжению.
Световод предназначен для отправки световых волн, вырабатываемых в передатчике одного блока управления, на приемник другого блока управления.
Недостатком волокно-оптической системы является требования плавных изгибов, радиус изгиба световода не должен превышать 25 мм.
Сеть «Ethernet» (буквально переводится как «эфирная сеть») отражает первоначальный принцип работы этой технологии: всё, передаваемое одним узлом, одновременно принимается всеми остальными (то есть имеется некое сходство с радиовещанием). В настоящее время практически всегда подключение происходит через коммутаторы (switch), так что кадры, отправляемые одним узлом, доходят лишь до адресата. В настоящее время для передачи данных в Ethernet используется витая пара и оптический кабель.
Разновидностью «Ethernet» является сеть StarLAN 10 использующая витую пару для передачи данных на скорости 10 Мбит/с. В дальнейшем эволюционировал в стандарт 10BASE-T в котором для передачи данных используется 4 провода кабеля витой пары (две скрученные пары). Следующее поколение ethernet-стандарта 10BASE-F использует оптический кабель и работает на скорости 10 Мбит/с.
Существует также быстрый Ethernet (Fast Ethernet , 100 Мбит/с) — общий термин для обозначения стандартов, использующих в качестве среды передачи данных две неэкранированные витые пары проводников, поддерживается дуплексная передача данных. Разновидностью является быстрого интернета является 100BASE-SX — стандарт, использующий оптический кабель. Интерфейсы бывают двух видов, отличаются длиной волны передатчика и маркируются либо цифрами (длина волны), либо одной латинской буквой A (1310) или B (1550). В паре могут работать только парные интерфейсы: с одной стороны, передатчик на 1310 нм, а с другой — на 1550 нм.
Самой быстрой сетью передачи данных является гигабитный Ethernet (Gigabit Ethernet, 1 Гбит/с) 1000BASE-T гигабитный стандарт. В передаче данных участвуют 4 витые пары, каждая пара используется одновременно для передачи по обоим направлениям со скоростью — 250 Мбит/с. В этой сети используется метод кодирования пятиуровневая фазоамплитудная модуляция. Разновидностями следует отметить 1000BASE-SX стандарт, использующий оптическое многомодовое волокно в с длиной волны, равной 850 нм и 1000BASE-LX , использующий одномодовое или многомодовое оптическое волокно во втором окне прозрачности с длиной волны, равной 1310 нм.
В настоящее время внедряются стандарты Ethernet со скоростью, промежуточной между 1 и 10 Гбит/с. Следующим этапом планируется использование 40-гигабитного и 100-гигабитного и даже терабитного Ethernet, однако необходимо преодолеть множество ограничений, включая 1550-нанометровые лазеры и модуляцию с частотой 15 ГГц. Для будущей сети нужны новые схемы модуляции, а также новое оптоволокно, новые лазеры, новая сетевая архитектура. Возможно, оптические сети будущего должны будут использовать волокно с вакуумной сердцевиной или углеродные волокна вместо кварцевых .
Bluetooth – беспроводная персональная сеть (Wireless personal area network, WPAN). Bluetooth обеспечивает обмен информацией между различными устройствами как на борту электромобиля, так и при внешнем взаимодействии, например, при беспроводной диагностике. Работает на повсеместно доступной радиочастоте для ближней связи, соединяют в себе две радиосистемы: первая обеспечивает передачу данных в 3 Мбит/с и имеет низкое энергопотребление; вторая обеспечивает возможность передачи данных со скоростью до 24 Мбит/с (сравнима со скоростью сетей Wi-Fi). Выбор радиосистемы для передачи данных зависит от размера передаваемого файла. Небольшие файлы передаются по медленному каналу, а большие — по высокоскоростному. Полоса частот принимается от 2,402 до 2,48 ГГц.
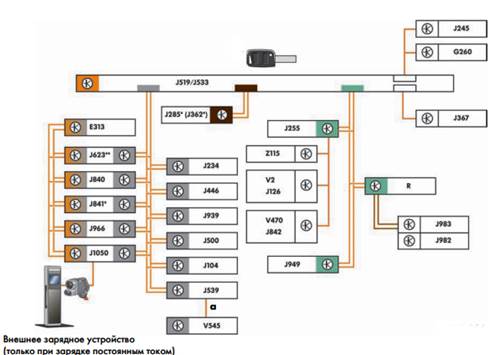
При рассмотрении систем управления электромобилем в первую очередь необходимо рассмотреть блок-схему системы обмена информацией, в основе которой лежит шина данных CAN. В связи с увеличением числа блоков управления в силовом агрегате, шина состоит из нескольких подшин, которые могут быть не подключены напрямую к межсетевому интерфейсу и служит для обмена данными между отдельными компонентами, в том числе высоковольтными. В отличие от обычного исполнения, на электромобиле комбинация приборов системы информации подключается к сети через собственную шину данных (рис. 6.23).
Условные обозначения:
|
a |
Выделенная шина CAN |
J539 |
|
|
E313 |
J623 |
Блок управления двигателя |
|
|
G260 |
Датчик влажности воздуха климатической установки |
J840 |
Блок управления системы регулирования АКБ |
|
J104 |
Блок управления ABS |
J841 |
|
|
J126 |
J842 |
||
|
J234 |
J939 |
||
|
J245 |
Блок управления сдвижного люка |
J949 |
Блок управления модуля аварийного вызова и коммуникационного блока |
|
J255 |
J966 |
||
|
J285 |
J982 |
||
|
J362 |
Блок управления иммобилайзера |
J983 |
Интерфейс портативной навигационной и информационно-командной системы |
|
J367 |
Блок управления контроля АКБ |
J1050 |
|
|
J446 |
Блок управления парковочного ассистента |
V2 |
|
|
J500 |
Блок управления усилителя рулевого управления |
V470 |
Электрический компрессор климатической установки |
|
J519 |
V545 |
Электродвигатель в ресивере тормозной системы для рекуперации |
|
|
J533 |
Диагностический интерфейс шин данных |
R |
Головное устройство |
|
|
|
Z115 |
|
|
|
Провод шины CAN |
|
CAN Комбинация приборов |
|
|
Провод шины LIN |
|
CAN Комфорт |
|
|
CAN Диагностика |
|
Шина LIN |

{kind=link}
Принцип организации при этом может быть следующий: в основе всей системы находится блок управления бортовой сети, который чаще всего объединен с блоком диагностического интерфейса шин данных. Этот блок обладает наиболее полной информацией о состоянии всех систем электромобиля, поэтому он соединен отдельной шиной с блоком управления системы информации или может быть физически совмещен с ним в одном корпусе. Как правило совместно с этими блоками совмещается блок управления иммобилайзером с соответствующими элементами связи с индикационным устройством (ключом, картой и т.п.).
Рассматривая схему классическим методом, следует выделить ряд блоков датчиков и блоков исполнительных устройств. При этом следует разделять все системы на основные и вспомогательные. В качестве основных следует выделить блок селектора, блок управления двигателя, блок управления электроприводом, блок управления напряжением зарядки высоковольтной батареи, а иногда и блок управления зарядным устройством высоковольтной АКБ. Все перечисленные блоки соединены в общую шину и имеют высокие приоритеты при обмене информацией. Однако с ними плотно работают блоки дополнительных систем, такие как блок управления подушками безопасности, блок управления парковочного ассистента, блок датчиков для функции экстренного торможения, блок управления усилителя рулевого управления, блок управления ABS, блок управления усилителя тормозов с которым по отдельной шине связан электродвигатель в ресивере тормозной системы для рекуперации. Отдельно от этих блоков непосредственно с блоком управления бортовой сетью работают другие вспомогательные блоки, такие как, блок управления климатом Climatronic с подключенным высоковольтным нагревательным элементом (PTC), блоком управления приточным вентилятором и блоком управления компрессором климатической установки. В этой же связке находится блок управления модуля аварийного вызова и коммуникационного блока, а также головное устройство с портативной навигационной и информационно-командной системой с соответствующим интерфейсом.