Инвертор, DC/DC преобразователь, контакторы являются важными компонентами высоковольтной сети, кроме рассмотренных выше тяговой АКБ и электродвигателей
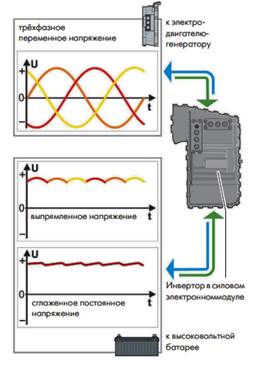
Так как электродвигатель в электромобилях и гибридных автомобилях представляет собой синхронный или асинхронный потребитель трехфазного переменного тока, а аккумуляторная батарея может накапливать только электроэнергию с постоянным напряжением, необходимо с помощью инвертора (рис. 5.4) проводить соответствующее преобразование напряжения.

Инвертор не только преобразовывает постоянный ток в переменный, но также и контролирует скорость частоты вращения вала электродвигателя и его мощность, а, следовательно, скорость и ускорение автомобиля. При ускорении автомобиля электродвигатель работает на старте с низкой, а затем с увеличивающейся частотой ротора. Соответственно динамика разгона автомобиля зависит и от увеличения крутящего момента, развиваемого электромотором.
Блок управления электромобилем управляет инвертором, который обеспечивает подачу электрической энергии электродвигателю для изменения крутящего момента и частоты вращения вала. Эти параметры формируются электронным блоком управления электродвигателем на основании входных параметров электромобиля. Основным входным сигналом для движения электромобиля является степень нажатия на педаль акселератора (ход). Блок управления подает сигнал на инвертор только при наличии разрешающих сигналов от других блоков и устройств. В первую очередь определяется: сигнал селектора движения (вперед, назад и т.д.), разрешающий сигнал по состоянию аккумуляторной батареи, наличию ограничений по степени заряда и ее состоянию. Определяются также ограничения по системам рулевого управления и торможения. При отсутствии ограничений, блок управления электродвигателем, вычисляя по положению селектора направление вращения (движения), дает команду на движение с требуемой мощностью по команде водителя.
Основным фактором для управления инвертором является команда (уровень сигнала) скорости вращения вала электромотора вне зависимости от крутящего момента, т.к. скорость движения электромобиля пропорциональна частоте вращения вала электрического двигателя. Одновременно блок управления двигателем определяет сигнал обратной связи от инвертора. Если инвертор дает по обратной связи сигнал о перегрузке, или о превышении порога температурного режима, то блок управления электродвигателем ограничивает мощность двигателя путем снижения скважности и амплитуды широтно-импульсной модуляции сигнала переменного напряжения и тока. Определение сигнала скорости вращения вала двигателя производится инвертором по датчику положения вала, сигнал которого поступает на вход компаратора, после сравнения, в котором формируется управляющий сигнал на увеличение или уменьшение скорости вращения электродвигателя.
Одновременно определяется сила тока в 2-х обмотках электродвигателя, которая служит для корректировки сигналов управления инвертора. Регулирование уровня выходящего напряжения преобразователя обеспечивается изменением ширины импульсов, которые управляют работой ключевого коммутирующего элемента. Стабилизация выходного напряжения создается методом обратной связи, то есть изменение выходного напряжения создает автоматическое изменение ширины импульсов.
Если водитель нажимает на педаль изменения скорости движения, на бортовой компьютер посылается сигнал, о необходимости преобразования в инверторе большей величины постоянного тока из аккумуляторной батареи в трехфазный переменный с последующей подачей на катушки статора электрического двигателя. Взаимодействие магнитных полей статора и ротора приводит во вращение ротор. Чем больше водитель перемещает педаль — тем больше частота и сила тока подается на обмотку статора и тем выше частота вращения ротора и, соответственно, ведущих колес автомобиля. Если водитель отпускает педаль изменения скорости движения, программа управления снижает частоту тока на обмотке электродвигателя и соответственно скорость вращения вала двигателя.
Во время движения электромобиля накатом ротор электродвигателя вращается с определенной скоростью, пропорциональной скорости вращения колес. В этот момент инвертор искусственно замедляет вращение электромагнитного поля в статоре. Возникает обратная электромагнитная сила (ЭДС индукции), которая будет пытаться остановить ротор, что с одной стороны замедляет электромобиль, а с другой стороны возникающую на обмотках избыточную энергию посредством инвертора преобразует в постоянный ток и направляет обратно в батарею. Таким образом реализуется рекуперативное торможение. Для этих целей в инверторе встроен контроллер с соответствующим программным обеспечением. На плате инвертора установлены мощные IGBT-транзисторы, способные работать при высоком напряжении с очень большой силой тока. При торможении поглощая энергию от двигателя, работающего в режиме генератора, они сильно греются. Поэтому на многих электромобилях применяются инверторы с водяным охлаждением.
Помимо реакции на сигналы педалей (хода) акселератора и тормоза, инвертор также управляется многими другими сигналами. Если, например, колеса начинают проскальзывать , сигнал об этом передается на инвертор, и он изменяет напряжение и частоту на обмотках статора, снижая частоту вращения вала электродвигателя, а значит и колес электром ABS обиля, что реализует алгоритм работы антипробуксовочной системы в режиме циклического торможения (торможения – растормаживания колеса). В классических же автомобилях используются отдельные антипробуксовочные системы с модулятором. В инверторе реализовываются и другие функции ABS: когда водитель производит замедление обычной тормозной системой и при этом может наступить юз колес. ЭБУ в случае блокировки колес может временно ускорить вращение вала электродвигателя, затем его замедлить, совершая циклический режим торможения. Программное обеспечение, инвертора, обрабатывает множество других управляющих сигналов.
На рис. 5.6 показана блок-схема инвертора и параметры, влияющие на систему управления.
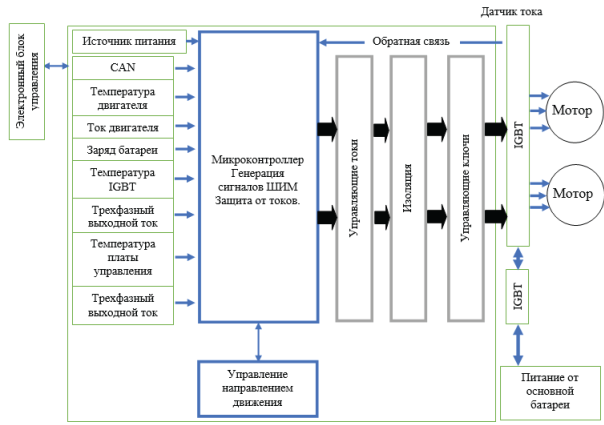
Биполярный транзистор (IGBT) или с изолированным затвором (БТИЗ); CAN-шина передачи данных
IGBT (Insulated Gate Bipolar Transistor — биполярный силовой транзистор с изолированным затвором) – элемент из двух транзисторов в общей полупроводниковой структуре, устроенный по каскадной схеме. Биполярный транзистор образует силовой канал, полевой – канал управления. Объединение полупроводниковых элементов реализовано структурой элементных ячеек в одном кристалле.
CAN шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Принцип работы, по которому действует CAN шины заключается в том, что необходимо быстро переработать поступившую информацию и отправить её обратно в качестве сигнала для определённой системы.
Опыт различных компаний в создании и реализации электромобилей, накопленный к настоящему моменту позволяют сформулировать определенные требования к конструкции электромобиля и к системе управления его приводу, в частности, те. которые относятся к системе управления двигателем и улучшают потребительские качества автомобиля, как средства передвижения.
К ним можно отнести следующие основные требования к системе управления электроприводом:
– плавное изменение скорости;
– стабильность автоматического поддержания установленной водителем скорости не ниже 10%, данное требование позволяет энергетически выгодно использовать энергию в условиях городской эксплуатации;
– плавное управление тяговым и тормозным моментом при разгоне и торможении соответственно;
– автоматическое ограничение максимального момента и мощности на определенном уровне;
– ограничение зарядного тока при рекуперативном торможении, при определенном уровне заряда;
– возможность движения в режиме наката с последующим плавным разгоном или электрическим торможением;
Рассмотрим, как работает инвертор автомобиля в этих случаях (рис. 5.7).
ЭБУ электро- или гибридного автомобиля получает информацию от различных датчиков, например, датчика положения тормозной педали, датчика акселератора, о переданном крутящем моменте, температуре электродвигателя, положении его ротора и др. Эта информация передается в качестве сигнала на биполярные транзисторы с изолированным затвором, который обеспечивают подачу напряжения на обмотки электродвигателя.
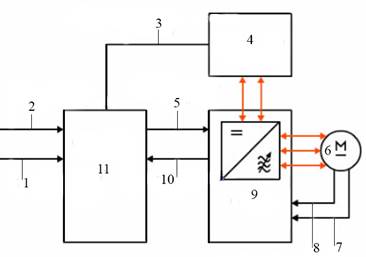
1 – сигнал датчика тормозной педали; 2 – сигнал датчика акселератора; 3 – состояние заряда высоковольтной АКБ; 4 – высоковольтная АКБ; 5 – сигнал требуемого крутящего момента; 6 – электродвигатель; 7 – сигнал датчика положения ротора электродвигателя; 8 – сигнал датчика температуры; 9 – инвертор; 10 – сигнал переданного крутящего момента; 11 – ЭБУ
Инверторы управляются импульсно-кодовой модуляцией и взаимодействуют с ЭБУ электропривода по сети FlexRay. По мере необходимости ЭБУ переключает инвертор между режимами электродвигателя и генератора. Инверторы подключены к системе охлаждения электромобиля, управление охлаждением регулируется для предотвращения перегрева с использованием специального 12-вольтного насоса охлаждающей жидкости, управляемого сигналом ШИМ.
Если ЭБУ электропривода работает в качестве электродвигателя , инвертор получает питание постоянного тока от высоковольтной аккумуляторной батареи и преобразует постоянный ток в 3-фазный переменный ток (AC). Этот блок управляет 3-фазным током, чтобы обеспечить работу электродвигателя. Современные схемы инверторов и вентильных преобразователей работают при частоте переключений между 1 и 20 кГц. Чем выше частота переключения, тем меньше пульсация тока двигателя.
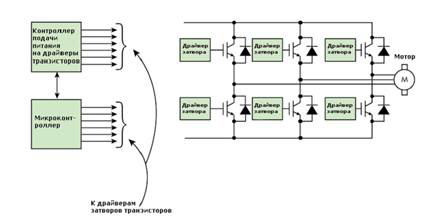
На рис. 5.8 показано, что для управления электродвигателем используется трехфазный полумост с IGBT. Для каждого IGBT используются специальные интегральные схемы — драйверы. Частота переключения транзисторов находится в диапазоне от 5 до 20 кГц.
Пример реализации силовой части инвертора с драйвером управления представлен на рис. 5.9.
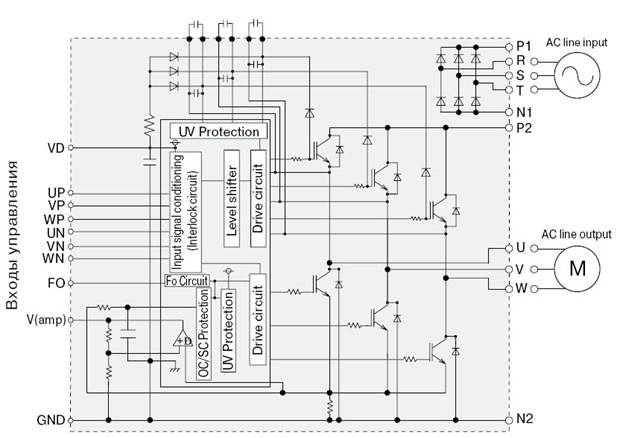
В силовой части инвертора используются обозначение следующих входов управления.
VD – входная цепь питания от внешнего низковольтного стабилизированного источника, предназначена для питания компонентов контроллера инвертора: систем защиты и цепей управления.
UP, VP, WP – логические входы для задания в противофазе выходов драйверов верхнего уровня для соответствующих фаз U, V, W.
UN, VN, WN – логические входы для задания в противофазе выходов драйверов нижнего уровня для соответствующих фаз U, V, W.
FO – Выходной сигнал блокировки при перегрузке по току или снижении напряжения (достижения нижнего уровня), сообщает контроллеру информацию нарушениях в цепях питания.
V (amp) – выходной сигнал напряжения датчика постоянного тока IGBT инвертора, в случае превышения порогового значения выдает ошибку контроллеру, который в свою очередь ограничивает силу тока путем уменьшения длительности включения транзисторов вплоть до полного прекращения.
GND – масса источника питания.
OC/SC Protection – защита по превышению значения силы тока в цепи транзисторов, или по наличию короткого замыкания в цепях.
UV Protection – Drive circuit –Блок защиты цепи питания и управления от пониженного значения напряжения, переводит в аварийный режим работы (ограничение мощности вплоть до полной остановки) или не допускает включение двигателя.
FO Circuit – Блок блокировки при перегрузке по силе тока или снижению напряжения (достижения нижнего уровня), сообщает контроллеру информацию нарушениях в цепях питания.
Input signal conditioning – Блок формирования входного сигнала.
Level shifter – Блок переключения уровня сигнала, в зависимости от специфики управления, согласует уровни сформированных сигналов с уровнем драйвера управления.
AC line output – Линейный выход переменного тока, поступающего на электродвигатель.
Такая подача питания определяется обратной связью от внутренних датчиков положения в электродвигателе, что обеспечивает плавную подачу питания с максимальной производительностью и эффективностью. Для работы электродвигателя, инвертор подает высоковольтный переменный ток по 3-м фазным кабелям. Фазировка переменного тока меняется в зависимости от того, какой уровень крутящего момент требуется обеспечить электродвигателю, и от сигналов датчика положения электродвигателя. Изменение типа напряжения осуществляется с помощью схемы в инверторе, которая изменяет поток напряжения от переменного до постоянного тока в режиме зарядки и от постоянного до переменного тока в режиме движения по мере необходимости.
Напряжение питания схемы осуществляется от промежуточного контура, поэтому, это напряжение называется напряжением промежуточного контура UD , который может иметь внутреннее сопряжение с высоковольтной аккумуляторной батареей.