Датчики классифицируются:
а) по характеристике:
− с плавно изменяющейся характеристикой: − с непрерывной линейной с широким диапазоном измерений (датчик положения педали акселератора);
− с непрерывной нелинейной в пределах узкого диапазона измерения (контроль положения запорной иглы форсунки);
− с резкоизменяющейся характеристикой: − с дискретной многоступенчатой: управление в случаях необходимости точного определения величины сигнала, если достигается его предельное значение;
− с дискретной двухуровневой: контроль поправки для прямого или последующего регулирования (контроль угла поворота шаговых электродвигателей).
− концевые выключатели: разомкнутые (контроль температуры); замкнутые (контроль частоты вращения коленчатого вала в режиме работы на х. х.);
б) по надежности и резервированию:
− датчики, выход из строя которых приводит к отказу системы (датчик частоты вращения и положения коленчатого вала);
− датчики, отсутствие сигнала с которых, может игнорироваться с продолжением работы в аварийном режиме (датчики температуры);
в) по способу контроля и получения информации:
− индуктивные;
− на основе эффекта Холла;
− электромагнитные (соленоидные);
− магнитоэлектрические;
− оптические и т. д.;
г) по типу выходного сигнала:
− аналоговые, в которых сигнал пропорционален: − амплитуде, величине тока или напряжения;
− частоте или периодичности;
− продолжительности импульса (коэффициенту заполнения импульсов);
− скважности импульсов;
− дискретные, в которых сигнал: − многоуровневый неравномерной градуировки;
− многоуровневый равномерный;
− двухуровневый (цифровой).
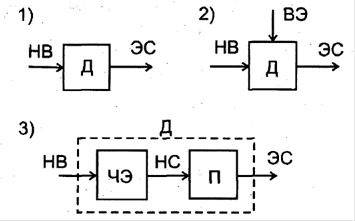
В зависимости от энергетического преобразования (рис. 3.2) датчики (Д) бывают активными (поз. 1), в которых выходной электрический сигнал (ЭС) возникает как следствие входного неэлектрического воздействия (НВ) без приложения сторонней электрической энергии за счет внутреннего физического эффекта (например, фотоэффекта), и пассивными (поз. 2), в которых электрический сигнал есть следствие модуляции внешней электрической энергии (ВЭ) управляющим неэлектрическим воздействием.
Таким образом, любой датчик всегда состоит как минимум из двух частей: из чувствительного элемента (ЧЭ), способного воспринимать входное неэлектрическое воздействие (перемещение, скорость, температуру, давление и т.д.), и преобразователя (П) промежуточного неэлектрического сигнала (НС) от чувствительного элемента в выходной электрический сигнал (ЭС) (поз. 3).
Наблюдаются тенденции интеграции автомобильных датчиков и увеличения их возможностей по переработке информации. По степени интеграции датчики условно разделяются на следующие уровни (рис. 3.3):
— обычный нулевой уровень (рис. 3.3, а) − аналоговый сигнал с датчика передается по линии связи (проводам) в ЭБУ, где и производится вся необходимая обработка. Такой метод наименее помехозащищен;
— уровень интеграции 1 (рис. 3.3, б) − в датчик встроены цепи предварительной аналоговой обработки сигнала, улучшена помехозащищенность;
— уровень интеграции 2 (рис. 3.3, в) − датчик помимо аналоговой обработки сигнала имеет аналого-цифровой преобразователь, может быть подключен к цифровой коммутационной шине, например, CAN, улучшена помехозащищенность, сигнал датчика становится доступным локальной сети контроллеров;
— уровень интеграции 3 (рис. 3.3, г) − датчики получают интеллектуальные возможности за счет установки в них микропроцессоров. Цифровой сигнал хорошо помехозащищен, есть возможности программной установки параметров датчиков под конкретную модель автомобиля, расширены диагностические возможности.

В автомобиле, например, обычному уровню соответствует датчик положения дроссельной заслонки, первому уровню интеграции – интегральный датчик разрежения во впускном коллекторе, а третьему уровню − радарный датчик скорости и расстояния для целей адаптивного круиз-контроля.
Прежде чем компьютерная измерительная система сможет измерить некоторую физическую величину, например, температуру, физический сигнал с помощью датчика или измерительного преобразователя должен быть преобразован в электрический − ток или напряжение. Под преобразованием сигналов следует понимать процесс предварительной обработки сигналов с целью улучшения точности измерений, качества изоляции цепей (развязки), фильтрации и т.д.
Чтобы измерять сигналы с датчиков, необходимо преобразовать их в форму, которую может воспринять устройство аналого-цифрового преобразования. Например, у большинства термопар выходное напряжение очень мало и соизмеримо с шумом. Следовательно, перед оцифровкой такого сигнала его необходимо усилить. Усиление (нормирование) является одной из форм преобразования.