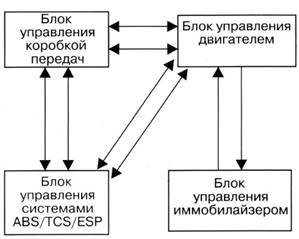
Обзор систем. Современное автомобилестроение огромными темпами внедряет инновационные технологии в системах управления. Общая тенденция в области автоматизации автомобилей состоит в замене традиционной централизованной системы управления на распределенную систему управления путем соединения блоков управления интеллектуальных датчиков и исполнительных механизмов. Это вызвано ростом числа проводов связи, увеличением количества соединений, сложностью диагностирования автомобилей и снижением надежности. Увеличивающееся применение электронных систем управления автомобилей с обратной и без обратной связи требует, чтобы индивидуальные электронные блоки управления работали в сети друг с другом. Такие системы управления включают в себя:
— управление коробкой передач;
— электронное управление двигателем, или регулирование подачи топлива;
— антиблокировочную систему тормозов (ABS);
— противобуксовочную электронную систему (TCS);
— электронную систему курсовой устойчивости (ESP);
— систему управления тормозным моментом (MSR);
— электронный иммобилайзер (EWS);
— бортовой компьютер и т.д.
Обмен информацией между системами уменьшает общее количество необходимых датчиков и улучшает управление отдельными системами. Интерфейсы систем передачи информации, проектируемые для применения в автомобилях, могут быть подразделены на четыре категории:
— обычные интерфейсы;
— последовательные интерфейсы, то есть сеть контроллеров (CAN);
— широкополосные шины передачи данных с временным разделением каналов (шина FlexRay);
— оптическая передача данных (шина типа МОSТ).
Обычная передача данных (интерфейсы). Обычная передача данных в автомобиле характеризуется тем, что каждый сигнал имеет свой собственный канал связи (провод) (рис. 5.10). Тем самым с каждой дополнительной информацией возрастает также число проводов и количество контактов на блоке управления, поэтому подобный тип передачи информации оправдывает себя только в случае ограниченного объема передаваемых данных.
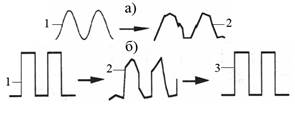
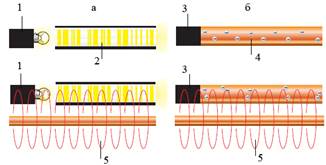
Такая передача сигналов характерно для аналоговой. Например, датчик частоты вращения колеса системы АВS выдает синусоидальное напряжение, частота и амплитуда которого зависит от скорости вращения колеса. Этот сигнал переменного напряжения передается по проводу в блок управления. Там аналоговый сигнал преобразуется в цифровой, поскольку микропроцессор блока управления может обрабатывать только цифровую информацию. Однако даже на коротких расстояниях могут возникнуть помехи, влияющие на правильную передачу аналогового сигнала. Так, например, взаимное влияние проводов, проложенных параллельно на небольшом расстоянии в автомобиле, могут сильно изменить сигнал (рис. 5.11, а). При передаче аналогового сигнала на другие блоки управления, он может исказиться настолько, что в результате может быть не понят. Несмотря на сложные системы фильтров и экранированные кабели, восстановление передаваемого сигнала возможно только в определенных пределах. Возникает ошибка.
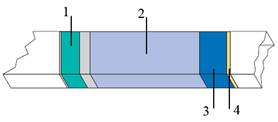
Увеличение обмена данными между электрическими компонентами автомобиля уже достигли таких объемов, что дальнейшие попытки управления через обычные интерфейсы уже не удовлетворяют современные системы управления, поэтому стали применяться шины передачи данных. При такой передаче блок управления АВS преобразует любую информацию датчика скорости вращения в последовательность импульсов. При этом различаются только состояния «напряжение высокое» и «напряжение низкое». Даже если последовательность импульсов будет принята в искаженном виде, при цифровой передаче с большой вероятностью сигнал восстанавливается (регенерируется) (рис. 5.11, б).
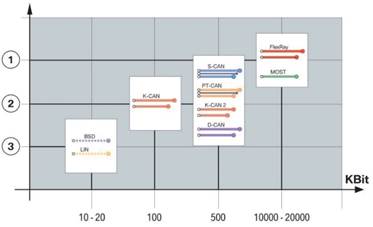
Все шинные системы передачи данных подразделяются на две главные группы:
- Основные шины (быстрые шины): Ethernet, FlexRay, KCAN, K-CAN 2, MOST, PT-CAN и PTCAN 2;
- Подшины (медленные шины): BSD, D-CAN (Diagnose-on-CAN), LIN, Local-CAN.
Основные шины обеспечивают обмен данными между блоками управления различных систем. Сюда же относятся системные функции диагностики, программирования и кодирования.
Подшины обеспечивают обмен данными в пределах одной функциональной группы. Например, данные датчика дождя, света, солнечного освещения и запотевания считываются блоком JBE, обрабатываются и передаются в модуль стеклоочистителя. Подшины служат также для связи между блоками управления, входящими в систему «Комфорт». Соединение между блоками управления RLS и JBE представляет собой подшину, а именно шину LIN.
Шины имеют различные скорости передачи данных (рис. 5.12)
SAE разделяет автомобильные сети на три класса: А, В и С, отличающиеся скоростью передачи данных и областями применения (табл. 5.1). К сетям класса С предъявляются особо жесткие требования, поскольку они по одному каналу связи обслуживают наиболее ответственные системы автомобиля, а передаваемые по ним сообщения могут быть как периодическими, так и случайными. Такие сети должны быть не только надежными и защищенными от внешних воздействий, но и обеспечивать возможность расстановки приоритетов различным сообщениям, сигнализировать об ошибках в передаче управляющих сигналов, иметь скорость реакции на важное сообщение определенной длительности.
|
Класс сети |
Скорость передачи |
Область применения данных |
|
A |
10 кбит/с |
Системы комфорта |
|
B |
10-125 кбит/с |
Самодиагностика |
|
C |
125 кбит/с–1 Мбит/с |
Системы управления двигателем, тормозами, коробкой передач, АБС и т.д. |
Шины CAN. В связи с возросшими требованиями передачи информации в автомобильных системах управления, вместо обычной электропроводки в современных автомобилях все более широкое распространение находят электронные цифровые шины данных типа CAN (Controller Area Network). Цифровая передача данных значительно надежнее обычной аналоговой – шина лучше защищена от помех, контакты надежнее изолированы от внешних воздействий.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
CAN-шина облегчает диагностику и ремонт вышедших из строя компонентов. Универсальная проводка подходит и для разных комплектаций одного автомобиля – дополнительные устройства просто подключаются к нужным разъемам.
В зависимости от приоритетов и требований к скорости передачи данных, шина связи может быть одно- или двухпроводной (рис.). Если для работы систем достаточно низкой скорости передачи данных, то используются шины с одним проводом связи. Если скорость должна быть высокой, применяют шины с двумя проводами связи.
Второй провод используется для проверки правильности переданной модулем управления информации и для самоконтроля модуля. Данные передаются по обоим проводам одновременно. Сигнал на первом проводе представляет собой перевернутое повторение сигнала, передаваемого по второму проводу.
Все связанные через шину CAN блоки управления подключаются к ней параллельно. Один из проводов шины CAN называется верхним (CAN_High), а другой — нижним (CAN_Low). Два невзаимозаменяемых скрученные между собой провода образуют пару (Twisted Pair) (рис. 5.13).
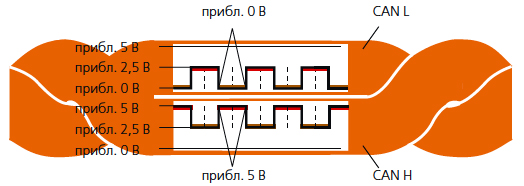
По верхнему проводу «CAN High» информация передается в виде электрических сигналов напряжением до теоретически возможного от 2,5 В до 5 В, а по нижнему проводу «CAN Low» — напряжением от 2,5 В до 0 В (рис. 3.11). Напряжения на проводах индивидуально задается производителем. Разность напряжений, равная нулю, дает уровень логического нуля, а разность напряжений в 2,5 В — уровень логической единицы.
В автомобиле источниками помех являются узлы, генерирующие во время работы искры, а также замыкающиеся и размыкающиеся цепи питания. Другими источниками помех являются, например, мобильные телефоны и радиостанции, то есть помехи могут создавать любые объекты, генерирующие электромагнитные волны. Поле помех, генерируемых такими источниками, может ухудшать передачу данных, а также приводить к искажению передаваемых данных. Два неэкранированных провода объединены в витую пару для предотвращения искажения передаваемых данных помехами. По витой паре передается разностный сигнал, т.е., другими словами, на проводах противопоставляются соответствующие значения напряжения. Если напряжение на одном из проводов шины данных составляет приблизительно 0 В, напряжение на другом проводе составляет приблизительно 5 В. В обратной ситуации, когда напряжение на проводах одинаково, оно составляет приблизительно 2,5 В. Таким образом, сумма напряжений на двух проводах в любой момент времени остается постоянной величиной, а влияние электромагнитных полей двух проводов шины данных нейтрализуется. Таким способом провода шины данных остаются защищенными от электромагнитных волн, генерируемых внешними источниками, а также не оказывают практически никакого воздействия на внешние объекты.
Скручивание проводов производится для того чтобы дополнительно ослабить помехи электромагнитного характера, а также излучающие помехи. Скручивание позволяет также устранить излучение шины, способное создать помехи работе других устройств.
CAN — мультимастерная шина, то есть без центрального управляющего устройства. Все подключаемые к центральному или центральным блокам электронные блоки разных систем (или контроллеры) равноправны – любой имеет доступ к передаваемым данным и может сам передавать.
CAN-шина относится к типу последовательных шин. Передача данных в шине CAN выполняется по протоколу в виде обмена сообщениями между блоками управления через очень короткие промежутки времени.
Для обеспечения единообразия стандарта CAN был принят CAN протокол. Введение протокола обеспечивает унификацию к форме CAN сообщения, доступа к сети определению и устранению ошибок времени передачи бита и синхронизации.
Протокол состоит из последовательности бит информации, передающихся друг за другом. Бит (вit) сокращение английского выражения “binary digit“ — бинарное значение, двоичная цифра. Бит — это мельчайшая единица информации, которую компьютер способен распознавать: 0 или 1, например “выкл“/”вкл“ или “0“/”1“.
Одна из целей CAN протокола заключается в определении, как в грамматике нашего языка, в какой форме данные должны передаваться по шине. Связь на базе CAN-шины похожа на наш разговорный язык в том, что передаваемые данные можно сравнить с предложением в человеческом языке. Тогда поле можно сравнить со словами в предложении. Биты — это буквы, из которых состоят слова. Полное сообщение в CAN-шине называется кадром данных.
Если бит имеет значение «выключено» (логический «0»), то говорят о рецессивном состоянии. Если бит имеет значение «включено» (логическая единица, «1»), то говорят о доминантном состоянии.
Для абстрагирования от среды передачи спецификация CAN избегает описывать биты данных как «0» и «1». Вместо этого применяются термины «рецессивный» бит и «доминантный» бит, при этом подразумевается, что при передаче одним узлом сети рецессивного бита, а другим доминантного, принят будет доминантный бит. Например, при реализации физического уровня на радиоканале отсутствие сигнала означает рецессивный бит, а наличие — доминантный; тогда как в типичной реализации проводной сети рецессив бывает при наличии сигнала, а доминант, соответственно, при отсутствии. Стандарт сети требует от «физического уровня», фактически, единственного условия: чтобы доминантный бит мог подавить рецессивный, но не наоборот. Например, в оптическом волокне доминантному биту должен соответствовать «свет», а рецессивному — «темнота». В электрическом проводе может быть так: рецессивное состояние — высокое напряжение на линии (от источника с большим внутренним сопротивлением), доминантное — низкое напряжение (доминантный узел сети «подтягивает» линию на землю). Если линия находится в рецессивном состоянии, перевести её в доминантный может любой узел сети (включив свет в оптоволокне или закоротив высокое напряжение). Наоборот — нельзя (включить темноту нельзя).
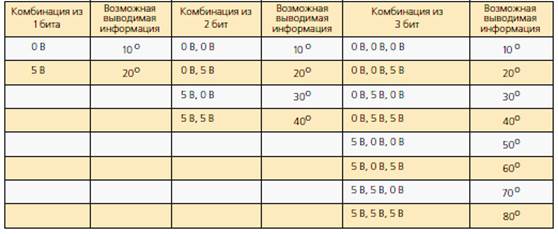
Число бит в протоколе передачи данных зависит от размера поля данных. Бит – минимальная единица передачи информации. В электронике биту может быть присвоено одно из двух возможных значений: «0» или «1» («да» или «нет»).
При наличии двух битов возможны четыре различные комбинации. Каждая комбинация может обозначать определенные данные. Этот способ организации одинаков для всех блоков управления.
В приведенной ниже табл. 5.2 показан способ формирования и передачи информации с помощью двух последовательных бит. Приведенный пример иллюстрирует передачу информации о положении дроссельной заслонки.
Каждый дополнительный бит удваивает количество элементов данных. Чем больше бит в последовательности, тем большее количество элементов данных может быть передано.
аблица 5.2
Зависимость количества элементов данных от числа бит
Данные передаются бит за битом как бусины по нитке, и таким же образом принимаются. Биты составляют отдельные поля (рис. 5.14) из них складываются так называемые кадры – основные информационные единицы.
Начало кадра (стартовый бит) 1 или обозначает начало протокола передачи данных. Прежде чем передающий блок управления сможет передать сообщение, ему придется узнать, какие блоки управления подключены к CAN-шине. Стартовый бит — это бит, благодаря которому блок управления дает сигнал всем блокам управления, подключенным к CAN-шине, что начата отправка сообщения.
Стартовый бит имеет длину одного бита и всегда является доминантным (0) бит.
Арбитражное поле 2 используется для обозначения приоритета протокола передачи данных. Например, если двум блокам управления требуется отправить сообщения одновременно, первым отправляет сообщение блок управления с более высоким приоритетом. Кроме того, оно используется для определения содержания сообщения (например, частота вращения коленчатого вала двигателя).
В поле управления (контрольное поле) 4 в виде кода записывается количество элементов информации в поле данных. Этим обеспечивается возможность для каждого приемника проверить, были ли получены все необходимые данные.
В поле данных 5 передаются элементы данных, являющиеся важными для других блоков управления. В этом поле содержится больше всего информации: от 0 до 64 бит (от 0 до 8 байт).
Поле CRC (поле циклической проверки) 6 используется для обнаружения ошибок в процессе передачи данных.
Поле циклической проверки чётности с избыточностью CRC — это результат расчета, выполненного передающим блоком управления с использованием всех нулей и единиц вплоть до самого поля циклической проверки чётности с избыточностью CRC, и добавленного в сообщение. Каждый получатель сообщения выполняет такой же расчет и сравнивает результат с полученным результатом поля циклической проверки четности с избыточностью CRC. В случае правильно переданного сообщения оба значения должны совпадать. Поле циклической проверки чётности с избыточностью CRC имеет длину, равную 16 битам, и содержит 15-битный циклический избыточный код и конечный бит поля контрольной суммы CRC.
Поле ACK (поле подтверждения) 7 содержит сигнал приемника передатчику о том, что протокол данных был успешно выполнен.
Передающий блок управления получает подтверждение как минимум от одного получателя о том, что сообщение было получено корректно. В случае обнаружения ошибки информация об этом немедленно передается передатчику, после чего отправка сообщения повторяется. Поле подтверждения ACK имеет длину, равную двум битам, и состоит из бита подтверждения (слот ACK) и разделителя (разделитель ACK). Оба бита передаются блоком управления как рецессивные (1). После того как приемник корректно получил сообщение, он передает доминантный бит (0) во время слота ACK. Это является подтверждением того, что сообщение было получено как минимум одним приемником.
Поле конца сообщения предназначено для проверки передатчиком протокола данных и отправки приемнику подтверждения о его безошибочном выполнении. В случае обнаружения ошибки передача данных немедленно прекращается, а затем выполняется повторно. Поле конца сообщения содержит семь рецессивных битов и указывает другим блокам управления на шине о том, что теперь сообщение закончено. Если получение подтверждается во время поля ACK, передающий блок управления завершает сообщением полем конца сообщения.
Один кадр может включать несколько параметров. Например, кадр, выдаваемый ЭБУ системы впрыска топлива, может состоять из следующих параметров:
— частота вращения коленчатого вала двигателя;
— средний эффективный крутящий момент двигателя;
— заданная водителем скорость движения;
— состояние системы круиз-контроля (включена или не включена);
— разрешение на включение компрессора кондиционера;
— величина крутящего момента двигателя без учета воздействия автоматической коробки передач.
Некоторые кадры выдаются периодически (например, кадр системы впрыска топлива — через каждые 10 секунд). Другие кадры выдаются при наступлении какого-либо события. Например, кадр, генерируемый ЭБУ подушек безопасности, выдается в случае удара, при этом выключается топливный насос, происходит разблокировка замков дверей и запрещается блокировка рулевой колонки.
Обмениваемая информация состоит из отдельных посланий. Эти послания могут быть отправлены и получены каждым из блоков управления. Каждое из посланий (рис. 5.15), составленное согласно протоколу, содержит данные о каком-либо физическом параметре, например, о частоте вращения коленчатого вала.
Примером идентификационного кода послания может быть: двигатель, содержания частота вращения коленчатого вала двигателя. В этом же послании могут содержаться другие данные, например, указания о холостом ходе, о передаче крутящего момента и о других режимах работы двигателя.
Длина поля данных (количество байт данных) может изменяться от 0 до 8 байт. Это зависит от количества информации, которое передатчик намеревается вставить в сообщение. Каждый блок управления, который получает сообщение, использует управляющее поле для определения момента, когда заканчивается поле данных и начинается поле контрольной суммы.
При этом величина частоты вращения представляется в двоичной форме, т. е. как последовательность нулей и единиц или бит (рис. 5.16). Например, значение частоты вращения двигателя 1800 об/мин может быть представлено как двоичное число 00010101.
При передаче сигналов каждое число в двоичном представлении преобразуется в поток последовательных импульсов (бит). Эти импульсы поступают через провод TX (передающий провод) на вход трансивера (усилителя). Он преобразует последовательность поступающих с модуля системы CAN двоичных сигналов (на логическом уровне) в электрические импульсы напряжения и наоборот, которые затем последовательно передаются на провод шины.
Процесс начинается с измерения частоты вращения посредством датчика 4, соединенного с блоком управления двигателем (рис. 5.17). Измеряемое значение периодически вводится во входное запоминающее устройство 8 микроконтроллера и по шине CAN передается на другие блоки управления, например, на блок управления в комбинации приборов. В связи с этим информация о частоте вращения копируется в выходном запоминающем устройстве 9 блока управления двигателем. Из выходного запоминающего устройства информация поступает в выходной почтовый ящик 6 модуля системы CAN. При поступлении актуальных данных в почтовый ящик вырабатывается специальный сигнал, символом которого является поднятый флаг 7.
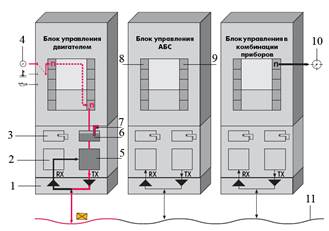
Выполнение процесса запуска завершается выдачей задания на передачу данных модулю системы CAN блок управления двигателем.
Прием послания производится в два этапа (рис. 5.18):
- Этап 1 проверка послания на содержание ошибок (на уровне контроля).
- Этап 2 проверка пригодности послания (на уровне признания).
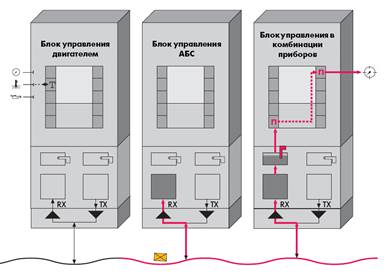
Все подключенные к шине блоки получают послание, отправленное блоком управления двигателем, но воспринимает послание блок управления комбинации приборов.
В табл. 5.3 показан пример упрощенной передачи данных на примере угла положения дроссельной заслонки, который показывает, как строится информация. Положение дроссельной заслонки передается 8 битами, таким образом возможно 256 вариантов комбинаций битов. С шагом 0, 4° передается положение заслонки от 0° до 102°.
|
Биты |
Положение дроссельной заслонки |
|
0000 0000 |
Угол дроссельной заслонки 000, 0° |
|
0000 0001 |
Угол дроссельной заслонки 000, 4° |
|
0000 0010 |
Угол дроссельной заслонки 000, 8° |
|
…… |
|
|
0101 0101 |
Угол дроссельной заслонки 034, 0° |
|
……. |
|
|
1111 1111 |
Угол дроссельной заслонки 102, 0° |
Трансивер представляет собою приемопередающее устройство, одновременно выполняющее функции усилителя. Он преобразует последовательность поступающих с модуля системы CAN двоичных сигналов (на логическом уровне) в электрические импульсы напряжения и наоборот. Связь трансивера с модулем системы CAN осуществляется посредством проводов TX (передающий провод) и RX (принимающий провод).
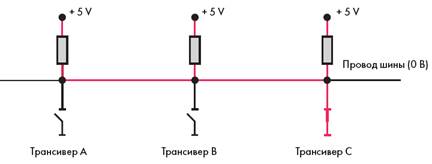
Провод RX соединен с шиной CAN через усилитель. Он позволяет постоянно «прослушивать» сигналы, передаваемые через шину. Особенностью подключения провода TX к шине является соединение через каскад с открытым коллектором. Благодаря этому могут быть реализованы два состояния шины (рис. 5.19):
Состояние 1: пассивное, уровень шины равен 1, провод шины соединен с источником тока через высокоомное сопротивление, при этом транзистор закрыт (выключатель разомкнут);
Состояние 0: активное, уровень шины равен 0, шина замкнута на «массу» через низкоомное сопротивление, при этом транзистор открыт (выключатель замкнут);
При приеме сигналов трансивер преобразует импульсы напряжения в последовательности бит и передает их через провод RX (приемный провод) на блок управления. В блоке управления последовательности двоичных сигналов вновь преобразуются в данные посланий. Например, двоичное число 00010101 преобразуется в частоту вращения 1800 об/мин. Передаваемое послание может быть принято каждым из блоков управления.
Этот принцип передачи данных называют широковещательным, так как он подобен принципу работы широковещательной радиостанции, сигналы которой принимаются каждым пользователем радиосети. Контроллеры отслеживают информацию: по принципу «слушаю всех», то есть каждый читает все проходящие по шине кадры, но принимает лишь адресованные ему данные. В данной ситуации, например, блок управления АБС пропустит ненужные сигналы от датчика частоты вращения коленчатого вала, а считает только необходимые сведения о частоте вращения колес автомобиля и т.д.
Другой принцип общения на шине позаимствован из компьютерных сетей и называется «один говорит – остальные слушают». Единовременно передавать данные может только один контроллер.
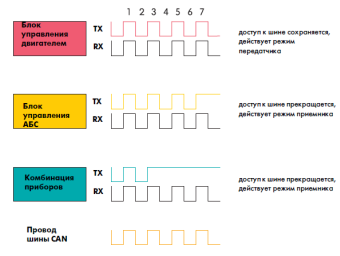
Каждый из активных блоков управления начинает процесс передачи данных с ввода идентификатора. Все блоки управления следят за состоянием шины, считывая с нее данные через провод RX (приемный провод). Каждый из блоков управления сравнивает бит за битом сигналы, передаваемые через провод TX (передающий провод) с сигналами, передаваемыми через провод RX.
В соответствии с принятой для шины CAN стратегией ситуация регулируется следующим образом: блок управления, сигнал которого на проводе TX обнуляется, должен прервать передачу данных через шину (рис. 5.20).
Число нулей в головной части идентификатора определяет ранг приоритета послания. Передача посланий производится в порядке, соответствующем их рангу. При этом действует правило: чем меньше число, обозначающее идентификатор, тем важнее послание. Этот способ оценки называют арбитражем. Этот термин является производным от слова арбитр или спортивный судья.
Приоритет передачи информации определяется по важности выполняемых функций. Соблюдение безопасности является главным пунктом для определения очередности. Расположение блоков управления по важности показано в табл. 5.4.
|
Приоритет |
Протокол данных от |
Информация |
|
1 |
блока управления ABS/EDS |
— контроль рулевого управления; — контроль тормозных сил на колесах; — контроль крутящего момента колес; — контроль параметров окружающей дорожной обстановки. |
|
2 |
блока управления двигателем |
— крутящий момент; — положение дроссельной заслонки; — температура охлаждающей жидкости; — скорость автомобиля. |
|
3 |
блока управления автоматической коробки передач |
— переключение передачи; — коробка передач в аварийном режиме; — положение рычага переключения. |
|
4 |
блока управления комфортом |
— температура внутри салона; -температура окружающей среды; — управление стеклоподъемниками. |
В качестве примера можно привести наивысший приоритет датчика поворота рулевого колеса, у которого послание с наибольшим числом нулей в его начале, благодаря которому вырабатываемые им данные отправляются в первую очередь (табл. 5.5).
|
Идентификатор |
Двоичный |
|
Двигатель |
010_1000_0000 |
|
Тормозная система |
010_1010_0000 |
|
Комбинация приборов |
011_0010_0000 |
|
Датчик угла поворота рулевого колеса |
000_1100_0000 |
|
Коробка передач |
010_0100_0000 |
Теоретически шину можно сделать любой длины и разместить на ней сколько угодно контроллеров. Однако на практике ограничивают и то, и другое. Это связано с тем, что скорость распространения сигналов не бесконечна, а все электронные блоки должны получать информацию одновременно.
Поэтому быстродействующие шины делают короткими – длиной не более 10 м, чтобы получить предельную скорость 2 Мбит/с.
При скорости 1 Мбит/с, максимальная протяженность длины кабеля шины около 40 метров. Это связано с тем, что арбитражная схема требует, чтобы фронтальная волна сигнала могла достигнуть удаленные устройства и вернуться обратно, прежде чем будут переданы данные.
На одной шине устанавливают обычно не более 64 контроллеров. Для увеличения передачи объема информации прокладывают несколько независимых цепей, потому что не все системы требуют максимального быстродействия CAN.
Вместо ключа зажигания в автомобилях, оборудованных CAN-шинами, все чаще используют электронный брелок, который взаимодействует с блоком управления двигателем через цифровую шину.
Шина LIN (локальная сеть воздействия) была разработана для удовлетворения потребностей устройств система комфорт. LIN – это сокращение от Local Interconnect Network (локальная коммутируемая сеть). Local Interconnect означает, что все блоки управления находятся в пределах одного ограниченного модуля (например, крыши или климат-контроля) (рис. 5.21).

— система кондиционирования (передача сигналов от элемента управления, активация вентилятора свежего воздуха).
Шина LIN представляет собой неэкранированный однопроводный кабель. Уровень шины может принимать два логических состояния. Доминантный уровень соответствует напряжению приблизительно 0 В (масса) и представляет собой логический 0. Рецессивный уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Скорость передачи по шине LIN ограничена величиной 20 кбит/с. Это компромисс между большой крутизной фронта импульсов, необходимой для синхронизации ведомых устройств, с одной стороны, и небольшой его крутизной, необходимой для улучшения ЕМС — с другой. Рекомендуемая скорость передачи составляют 2400, 9600 и 19200 бит/с. Минимально допустимая скорость составляет 1 кбит/с.
Максимальное количество узлов не регламентируется в спецификации LIN. Теоретически оно ограничено количеством доступных идентификаторов сообщений. Возможности линии и узла и крутизна фронта импульсов ограничивают сочетание длины и количества узлов сети LIN; рекомендуется не более 16 узлов.
Доступ к шине LIN обеспечивается на основе доступа «ведущий-ведомый». В сети имеется ведущее устройство, инициирующее каждое сообщение. Ведомое устройство имеет возможность ответить. Обмен сообщениями происходит между ведущим и одним, несколькими либо всеми ведомыми устройствами.
Шина FlexRay. Возросшие требования к скорости передачи и безопасности данных требуют применения широкополосных шин передачи данных с временным разделением каналов (временным управлением). Для сравнения: шина CAN представляет собой событийно-управляемую шину данных.
FlexRay представляет собой последовательную, детерминистическую и устойчивую к сбоям шину передачи данных для применения в автомобиле. Скорость передачи данных по шине FlexRay составляет 10 Мбит/с, что в двадцать раз превышает скорость передачи по высокоскоростной шине CAN (500 кбит/с).
Другой важной особенностью является гарантированное время реакции или латентный период реагирования, который представляет собой время, которое требуется сообщению на прохождение от отправителя до получателя. В связи с этим говорят также о детерминистической (предопределённой, регламентированной) передаче. Это означает, что данные поступают к адресату или адресатам к строго определённому или предварительно заданному моменту времени (возможность применения в режиме реального времени).
В отличие от шины CAN, в случае шины FlexRay для активации шины требуется не менее двух блоков управления. Эти блоки управления именуются блоками управления холодного запуска (KS). Их число для каждой сети FlexRay ограничено максимум тремя блоками.
Для обеспечения обмена данными с временным разделением каналов, в пределах этой конкретной сети передачи данных с помощью синхронизации нескольких блоков управления задаётся единая точка отсчёта времени. Благодаря синхронизации внутренних часов блоков управления в системе FlexRay, выход из строя отдельных блоков управления не оказывает влияние на коммуникационные характеристики остальных блоков управления.
Обычно синхронизацию шины FlexRay обеспечивают четыре блока управления, называемые синхронизирующими блоками управления. Если в системе шины FlexRay имеется более четырёх блоков управления, то остальные блоки синхронизируются по точке отсчёта времени, заданной синхронизирующими блоками. Поскольку эти дополнительные блоки управления интегрируются в работающую, синхронизированную систему, их называют интеграционными блоками управления.
Шина FlexRay имеет следующие особенности:
● электрическая двухпроводная шина данных;
● скорость передачи данных: макс. 10 Мбит/с;
● комбинированная топология шины;
● возможность применения в режиме реального времени;
● обеспечивает распределённое управление и применение в системах, связанных с обеспечением безопасности;
● синхронная передача данных.
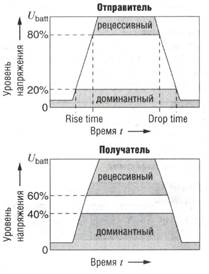
Шина FlexRay двухпроводная. Плюсовой провод (BP)обозначаются красным цветом, минусовой (ВМ) – синим. Уровень напряжения на обоих проводах колеблется в диапазоне от минимума в 2,2В до максимума в 2,8В (рис. 5.23) (для сравнений в высокоскоростной шине CAN от 1,5В до 3 В). Уровень разностного напряжения составляет не менее 600 мВ (в высокоскоростной шине CAN 2В).
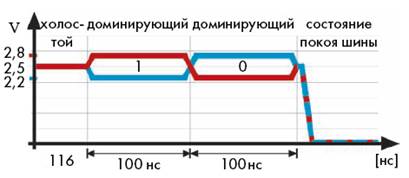
● «холостой» — уровень напряжения обоих проводов шины рецессивный и составляет 2,5В (режим холостого хода). Рецессивный означает, что уровень напряжения может быть превышен (перезаписан) другим блоком управления;
● 0 — провод BP имеет низкий, а провод BM — высокий доминирующий уровень напряжения. Доминирующий означает, что этот уровень напряжения не может быть превышен (перезаписан) другими блоками управления;
● 1 — провод BP имеет высокий, а провод BM — низкий доминирующий уровень напряжения.
При таких параметрах уровня напряжения время передачи бита составляет 100 наносекунд (нс) (для сравнений в высокоскоростной шине 2000 нс).
Шинная система FlexRay в автомобиле может иметь различную топологию и предлагаться в различных исполнениях. Существуют следующие виды топологии шинной системы:
- линейная;
- звездообразная;
- смешанная.
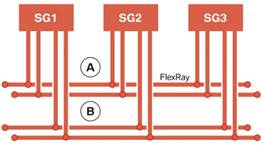
При линейной топологии все блоки управления (напр., SG1 – SG3) соединены между собой двухпроводной шиной (рис. 5.24).
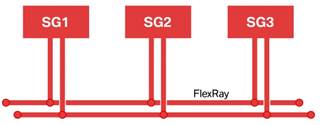
В качестве среды передачи используется, витая пара медных проводов. Такой вид соединения применяется также в шинах CAN. По обоим проводам передается одинаковая информация, однако с разным уровнем напряжения. Передаваемый разностный сигнал нечувствителен к помехам. Линейная топология шинной системы может быть использована только для передачи данных посредством электрических сигналов.
При звездообразной топологии каждый сателлит (блоки управления SG2 – SG5) соединен отдельным проводом с центральным блоком управления (SG1) (рис. 5.25).
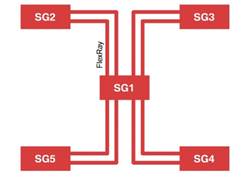
Звездообразная топология может быть использована для передачи данных как посредством электрических сигналов, так и с помощью световых импульсов.
При смешанной топологии разные шинная система частично имеет линейную, частично звездообразную конфигурацию.
Резервирование при передаче данных. В отказоустойчивых системах даже при обрыве одной линии шины должна быть обеспечена надежность передачи данных. Это достигается за счет резервирования, т. е. возможности передачи данных по второй линии.
В шинной системе с резервированием передачи данных предусмотрены два независимых канала (рис. 5.26).
Каждый канал состоит из двухпроводного соединения. В случае повреждения одного канала информация, поступавшая по нему, передается по второму каналу, работающему в нормальном режиме. При резервированной передаче данных шина FlexRay также может иметь смешанную топологию.
Шина MOST. Центральный блок информационно-командной системы может соединяться с процессором навигационной и других систем посредством оптического кабеля (шина типа МОSТ «Media Oriented Systems Transport»). Это необходимо для защиты от помех линии передачи данных. Для передачи данных через оптический кабель следует преобразовать аналоговую информацию в серии световых импульсов, которые могут затем распространяться через стеклянные волокна кабеля. У световых волн, по сравнению с радиоволнами, длина волны короче, они не создают электромагнитных помех и сами являются невосприимчивыми к таковым.
У металлических проводников создаются поля вокруг любого проводника, по которому проходит электрический ток (рис. 5.27). Поэтому проложенные параллельно или перекрещивающиеся проводники тока создают взаимные помехи. Помехи создаются также электромагнитными волнами, генерируемыми, например, мобильным телефоном. При использовании волоконно-оптической связи такие помехи отсутствуют.
Преимуществом современных волокно-оптических систем, кроме отсутствия помех, является также скорость передачи данных, которая достигает 21,2 Mbit/s, что позволяет передавать информацию в виде цифрового сигнала. Такая связь находит применение при приеме аудио и видео передач, при приеме которой требуется скорость передачи данных порядка 6 Mbit/s и больше, в то время как шина CAN может передавать данные со скоростью до 1 Mbit/s, при большом количестве жил в жгуте проводов.
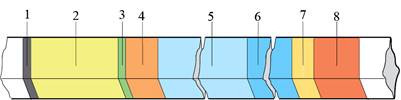
Основными компонентами волокно-оптических систем (рис. 3.24) являются светодиоды и фотодиоды, составляющие приемопередатчик; трансивер; световод; микропроцессор.
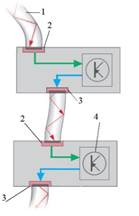
Светодиод предназначен для преобразования сигнала по напряжению в световой сигнал. Длина волны выработанных световых волн составляет от 650 nm и их видно, как красный свет.
Фотодиод предназначен для преобразования световых волн в сигналы по напряжению.
Световод предназначен для отправки световых волн, вырабатываемых в передатчике одного блока управления, на приемник другого блока управления.
Он состоит из нескольких слоев: ядра, прозрачного слоя, черной оболочки, цветной оболочки (рис. 5.29).
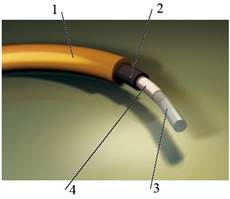
Ядром 3 является центральная часть световода, состоящая из полиметил-метакрилата. По нему свет проходит по принципу полного отражения почти без потерь. Для полного отражения вокруг ядра установлен прозрачный с оптической точки зрения слой 4 из фторполимера. Черная оболочка 2, состоящая из полиамида, предохраняет ядро от внешнего светоизлучения. Цветная оболочка 1 предназначена для маркировки, и защиты от механических повреждений, а также от воздействия температуры.
Недостатком волокно-оптической системы является требования плавных изгибов, радиус изгиба световода не должен превышать 25 мм.
Шина MOST представляет шину последовательной передачи данных (аудио, видео, голосовые сигналы, данные) по оптическому кабелю (рис. 5.30). С точки зрения физического исполнения в случае шины MOST речь идёт о кольцевой структуре (топологии) сети. Шина MOST может включать до 64 устройств.
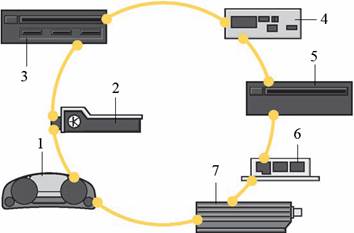
Шина MOST имеет следующие особенности:
● оптическая шина передачи данных;
● скорость передачи данных: 21,2 Мбит/с;
● кольцевая топология шины;
● адресноориентированная передача сообщений определённым адресатам;
● циклическая и управляемая событиями передача данных;
● высокая помехозащищённость.
С помощью оптической шины MOST обмен данными между абонентами шины происходит в цифровом формате. Передача данных с помощью световых волн позволяет достичь существенно больших скоростей передачи данных.
Передача данных в шине MOST происходит по различным каналам: управления, синхронному и асинхронному (рис. 5.31).
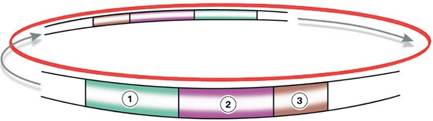
По каналу управления пересылаются управляющие сигналы, например, регулировки громкости звука для усилителя и данные для диагностики.
Синхронный канал используется преимущественно для пересылки аудиосигналов.
По асинхронному каналу передаются отображаемые данные системы навигации, например, изображение дорожной карты и стрелочный указатель.
Для программирования блоков управления в сети MOST используются канал управления и асинхронный канал, адаптированные к прямому доступу к шине MOST.
Диагностическая шина D—CAN. При подключении фирменного тестера
производителя межсетевой преобразователь (центральный модуль межсетевого обмена) переадресует запросы тестера внутренним шинам. Ответные сигналы поступают в обратном направлении. При этом для диагностики используется новый протокол обмена данными. Шина D-CAN (Diagnostics on CAN) заменила применявшийся ранее всеми производителями диагностический интерфейс и соответствующий протокол, базировавшийся на KWP 2000 (Keyword Protocol 2000).
Основанием для такого перехода послужило новое законодательное предписание, действующее в США, согласно которому все автомобили с 2008 модельного года должны быть оборудованы шиной D-CAN.
Шины Ethernet – это проводная сетевая технология. В настоящее время большая часть компьютерных сетей функционирует на базе этой технологии обмена данными, со скоростью передачи данных 100 Мбит/с.
В качестве протоколов передачи данных используются TCP/IP (Transmission Control Protocol/ Internet Protocol) и UDP (User Datagramm Protocol). Каждый абонент сети Ethernet имеет индивидуальный идентификационный номер, MAC — адрес (Media Access Control). По этому адресу и номеру VIN (Vehicle Identification Number) при установлении связи происходит идентификация автомобиля. Это обеспечивает защиту баз данных и зарегистрированных значений от изменения третьими лицами.
Аналогично компьютерной сети в офисе каждый прибор в составе сети должен однозначно идентифицироваться. Поэтому после установления связи центральный модуль межсетевого обмена получает от системы программирования так называемый выделенный IP-адрес. IP-адрес в сети выполняет такую же функцию, как номер телефона в телефонной сети.
Кроме вышеперечисленных систем передачи данных в автомобилях могут применяться системы ISO, SCP, ACP, радио система Bluetooth.
ISO (International Organization for Standardization (Международная организация по стандартизации)). Шина ISO состоит из одного единственного провода связи/коммуникации (провода K). Провод K служит не для связи модулей управления между собой, а исключительно для диагностики отдельного модуля управления. Скорость последовательной передачи данных зависит от модельного года автомобиля. Она может составлять от 4,8 до 10,4 кбит/с.
SCP (Standard Corporate Protocol (стандартный корпоративный протокол)). Шина SCP состоит из витой пары проводов. При повреждении только одного из двух проводов связь между модулем управления и диагностическим тестером сохраняется. Вся информация передается последовательно пакетами (блоками данных). Скорость передачи данных составляет примерно 41,6 кбит/с. Все узлы, то есть точки подсоединения модулей управления, равноправны. Поэтому в реализации то или иной функции могут участвовать сразу несколько модулей управления. Если необходимости одновременно передать несколько сообщений, они обрабатываются по очереди в соответствии со степенью их важности. На каждое посланное сообщение должен прийти, по меньшей мере, один корректный отклик. Если этого не происходит, в память неисправностей записывается код неисправности.
ACP (Audio Control Protocol (протокол управления аудиотехникой)) имеет сходство с шиной SCP, но отличается более простым протоколом и используется исключительно в аудио- и телефонных системах.
Радио система Bluetooth. Последней разработкой в области системных сетей является технология Bluetooth. Речь идет о ближней радиосистеме, то есть беспроводной шинной системе, используемой как в компьютерной технике, так и в области мобильной радиосвязи, и объединяющей их через интерфейс Bluetooth. Она объединяет разные приборы, устройства обработки информации, управляемые мобильной радиосвязью. Технология Bluetooth использует свободный от лицензирования во всем мире ISМ-диапазон в частотном диапазоне 2,45 Гц с мощностью передачи 1 мВт и имеет с действия около 10 м. Нужна всего лишь одна маленькая короткая антенна, и скорость передачи может достигать до 1 Мбит/с. Система состоит из задающего блока, который создает связь и определяет последовательность отправки. Каждое устройство имеет свой адрес, а передача данных происходит адресовано.
На автомобилях применяются различные типы шин в зависимости от важности передаваемых сообщений. В качестве примера на рис. 5.32 приводится структура шин автомобиля BMW.
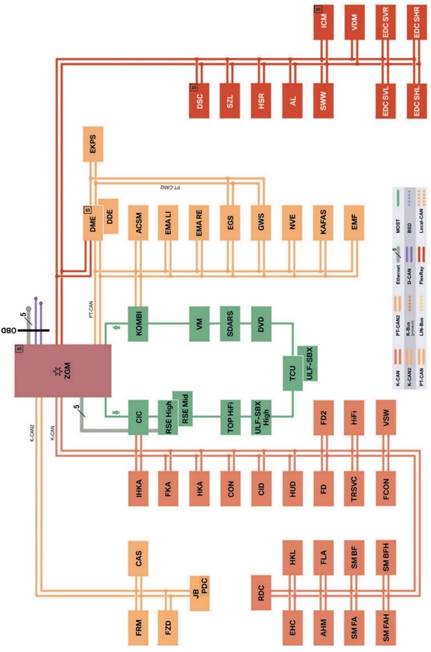
ACSM — блок управления ACSM (Advanced Crash Safety Module); AHM — модуль прицепа; AL — активное рулевое управление; CAS — система доступа в автомобиль; CIC — Сar Information Computer; CID — центральный информационный дисплей; CON – контроллер; DDE — цифровая электронная система управления дизельным двигателем; DME — цифровая электронная система управления двигателем; DSC — система динамического контроля стабильности; DVD — DVD чейнджер; EDCSHL — сателлит электронной системы регулирования жесткости амортизаторов, левый задний; EDCSHR — сателлит электронной системы регулирования жесткости амортизаторов, правый задний; EDC SVL — сателлит электронной системы регулирования жесткости амортизаторов, левый передний; EDC SVR — сателлит электронной системы регулирования жесткости амортизаторов, правый передний; EGS — электронная система управления коробкой передач; EHC — электронная система регулировки дорожного просвета; EKPS — система управления топливным электронасосом; EMALI — ремень безопасности с левой стороны; EMARE — ремень безопасности с правой стороны; EMF — электромеханический стояночный тормоз; FCON — контроллер задней части салона; FD — задний дисплей; FD2 — задний дисплей 2; FKA — система отопления и кондиционирования задней части салона; FLA — система управления дальним светом фар; FRM — модуль в пространстве для ног; FZD — функциональный центр в крыше; GWS — переключатель выбора передач; HiFi — усилитель HiFi; HKL — подъемник крышки багажника; HSR — регулировка угла бокового увода заднего мост; HUD — виртуальный дисплей; ICM — встроенное управление ходовой частью; IHKA -встроенная автоматическая система отопления и кондиционирования; JBE — блок JBE; KAFAS — системы помощи водителю на базе видеокамеры; KOMBI — комбинация приборов; NVE — электронный блок системы ночного видения; PDC — сигнализация аварийного сближения при парковке; RDC — система контроля давления в шинах; OBD- гнездо диагностического разъема; RSE Mid — развлекательная система для задних пассажиров; RSE High — развлекательная система для задних пассажиров Professional; SDARS — спутниковый радиоприемник (для США); SMBF — модуль сиденья переднего пассажира; SMBFH — модуль заднего сиденья на стороне переднего пассажира; SMFA — модуль сиденья водителя; SMFAH — модуль заднего сиденья на стороне водителя; SWW — сигнализация смены полосы движения; SZL — коммутационный центр в рулевой колонке; TCU — тelematic Control Unit; TOP HIFI — система Top HiFi; TRSVC — блок управления видеокамерой заднего вида и бокового вида; ULF SBX — интерфейсный блок (функциональные возможности ULF); ULF SBXHigh — интерфейсный блок High (Bluetooth телефония, ввод голосовой команды и USB аудиопорт); VDM — система управления вертикальной динамикой (центральныблок электронной системы регулирования жесткости амортизаторов); VM – видеомодуль; VSW – видеокоммутатор; ZGM — центральный модуль межсетевого обмена.
Сеть передачи данных на состоит из различных шинных систем, которые обеспечивают обмен данными между отдельными блоками управления. Все возрастающее сетевое взаимодействие блоков управления обеспечивает возможность более универсального использования датчиков различных систем. Датчики подключаются к тому блоку управления, который в первую очередь нуждается в информации в рамках логической схемы или по принципу актуальности, однако данная информация также может быть предоставлена другим блокам управления.
В современных автомобилях, как правило, применяются три вида шин, работающие с разными скоростями (рис. 3.19). Наиболее важные устройства и системы (ABS, ESP, ЭБУ двигателем и др.) подключаются к скоростной магистрали с пропускной способностью 500…1000 Кбит/с практически обеспечивающей работу системы в реальном времени.
Менее быстрые и важные приборы система комфорт или информационно-командной система (радио, монитор на центральной консоли, система навигации и кондиционирования) завязаны на другую шину со скоростью 95,2…100 Кбит/с.
Для остальных «медленных» устройств система комфорт (дверных замков, систем освещения, стеклоподъемников) служит третья шина с скоростью — 33,3… 100 Кбит/с.
Виды основных шин передачи данных на примере автомобиля BMW указаны в табл. 5.6.
|
Основная шина |
Скорость передачи данных |
Структура шин |
|
D-CAN |
500 кбит/с |
Линейная, двухпроводная |
|
Ethernet |
100 Мбит/с |
Линейная |
|
FlexRay |
10 Мбит/с |
Смешанная топология, двухпроводная |
|
K-CAN (кузовная шина CAN) |
100 кбит/с |
Линейная, два провода, в аварийном режиме возможна передача по одному проводу |
|
K-CAN 2 (кузовная шина CAN для ускоренного обмена данными) |
500 кбит/с |
Линейная, двухпроводная |
|
MOST (шина Media-Oriented- System-Transport) |
22,5 Мбит/с |
Кольцевая, оптоволоконная |
|
PT-CAN (шина CAN ходовой части) |
500 кбит/с |
Линейная, двухпроводная |
|
PT-CAN 2 (шина CAN двигателя и трансмиссии) |
500 кбит/с |
Линейная, двухпроводная |