Назначение систем управления двигателями.
1.1. Основные функциональные задачи СУД
Двигатель является устройством, выполняющим функцию управляемого преобразования химической энергии топлива в механическую работу (энергию).
Как объект управления двигатель характеризуется: входными параметрами – параметрами, влияющими на протекание рабочего процесса в двигателе. Их значения определяются внешними воздействиями на двигатель со стороны водителя или СУД, поэтому их также называют управляющими. К их числу можно отнести: угол открытия дроссельной заслонки; угол опережения зажигания; цикловая подача топлива; цикловое наполнение двигателя воздухом и др.;
выходными (управляемыми) параметрами, характеризующими состояние двигателя в рабочем режиме. К ним относятся: частота вращения коленчатого вала; отдаваемая мощность; крутящий момент; показатель топливной экономичности; показатели токсичности отработавших газов (содержание СО, СН, NOx) и др.;
внутренними параметрами или параметрами состояния, характеризующими рабочие процессы, состояние обеспечивающих систем, конструктивные особенности двигателя. К ним относятся: температура двигателя; напряжение в электрической сети; степень сжатия рабочей смеси и пр.;
внешними воздействиями, носящими случайный характер и мешающими управлению. К ним могут быть отнесены: температура атмосферного воздуха; атмосферное давление; влажность воздуха и т.п.
Назначение системы управления состоит в том, чтобы обеспечить оптимальный состав рабочей смеси в цилиндрах двигателя и воспламенить её в цилиндре двигателя в определённый момент времени.
Состав рабочей смеси характеризуется двумя основными показателями:
— отношением количества топлива и воздуха в составе смеси показатель – «лямбда»;
— гомогенностью (однородностью) т. е. качеством смешивания составных частей смеси.
Момент воспламенения смеси определяется углом опережения зажигания.
1.2. Принципы управления
Принцип управления дает общее представление о способе управления объектом управления. Он показывает, как объект управления должен реагировать на возмущения и управляющие сигналы. Охарактеризуем принципы, заложенные в основу построения существующих систем управления (СУД).
Автомобильный двигатель представляет собой систему, состоящую из отдельных подсистем: топливно-эмиссионной, зажигания, охлаждения, смазки и т.д. Все системы связаны друг с другом и при функционировании они образуют единое целое.
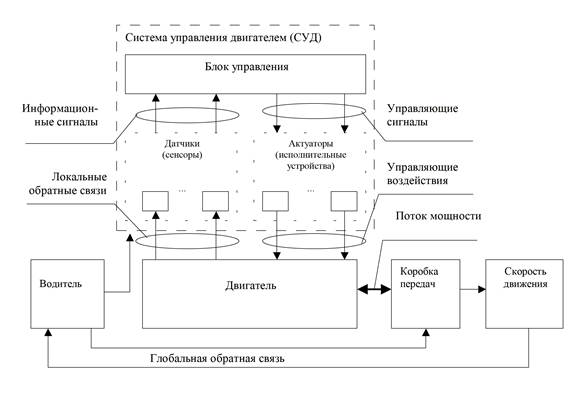
Управление двигателем нельзя рассматривать в отрыве от управления автомобилем. Скоростные и нагрузочные режимы работы двигателя зависят от скоростных режимов движения автомобиля в различных условиях эксплуатации, которые включают в себя разгоны и замедления, движение с относительно постоянной скоростью, остановки. Водитель изменяет скоростной и нагрузочный режим двигателя, воздействуя на передаточное отношение трансмиссии автомобиля и педаль акселератора (дроссельную заслонку). Выходные характеристики двигателя при этом зависят от состава топливовоздушной смеси и угла опережения зажигания, управление которыми осуществляется с помощью механических, электронно-механических или электронных систем управления двигателем (рис. 6.1).
Для двигателя внутреннего сгорания характерна периодическая повторяемость рабочих циклов. Поэтому важным принципом управления двигателем является цикличность управления. Это обуславливает необходимость согласования частотных параметров управляющих воздействий с частотой рабочих циклов двигателя. Иными словами, СУД должна успевать воспринимать информацию о состоянии двигателя, обрабатывать ее и передавать соответствующие управляющие воздействия на двигатель в течение ограниченных по времени тактов рабочего цикла (2-3 мс), что накладывает жесткие требования на быстродействие СУД.
Как объект управления двигатель является нелинейным, так как реакция на сумму любых внешних воздействий не равна сумме реакций на каждое из воздействий в отдельности. Учитывая, что двигатель обычно работает на нестационарных (переменных во времени) режимах, возникает проблема оптимального и адаптивного (самонастраиваемого) управления двигателем. Принципы оптимального и адаптивного управления оказалось возможным реализовать благодаря развитию электронных систем управления.
Следует заметить, что для построения оптимальных адаптивных управляющих систем требуется наличие математических моделей объекта управления. Из-за сложности конструкции, наличия допусков на размеры деталей, двигатели одной и той же модели имеют различные характеристики. Кроме того, по конструктивным параметрам отличаются и отдельные цилиндры многоцилиндрового двигателя. В этой связи необходимо иметь общие, достаточно точные и полные математические зависимости между параметрами индивидуальных типов двигателей и представлении их в форме таблиц. Эти таблицы содержат большие объемы данных и используются в системах управления двигателем.
Автомобильный двигатель представляет собой многомерный объект управления, т.к. число входных параметров у него больше одного и каждый входной параметр воздействует на два и более выходных. В таком случае система управления должна быть многомерной. Для многомерных объектов управления таблицы зависимостей между параметрами должны быть также многомерными.
На основании вышеизложенного можно сформулировать основные принципы управления двигателем: цикличность управляющих воздействий, синхронизированная с тактами рабочего цикла двигателя; сочетание программного управления с обратными связями; оптимальность и адаптивность управления.