Объединение различных электронных систем автомобиля в сеть, помимо обмена информацией, позволяет организовать их совместную работу. На этом принципе построена система интегрированного управления динамикой автомобиля. Система объединяет систему курсовой устойчивости, рулевое управление, трансмиссию и подвеску автомобиля, которые до этого работали самостоятельно.
Система управления динамикой автомобиля направлена на поддержание курсовой устойчивости, повышение маневренности, снижение нагрузки на водителя. Система представляет собой специальное программное обеспечение, которое устанавливается, как правило, в блок управления системы курсовой устойчивости. Система не имеет собственных конструктивных элементов, поэтому системой, как таковой, является лишь условно.
В интегрированной системе управления динамикой автомобиля могут быть реализованы следующие функции:
дополнительный крутящий момент на рулевом колесе (ассистент рулевой коррекции);
дополнительный угол поворота передних колес (ассистент рулевой коррекции);
угол поворота колес задней оси на заднеприводных автомобилях;
распределение крутящего момента между передней и задней осью на полноприводных автомобилях;
распределение крутящего момента между правым и левым ведущими колесами;
снижение кренов и раскачивания подвески.
Дополнительный крутящий момент на рулевом колесе оказывает влияние на действия водителя. При избыточной поворачиваемости крутящий момент создается в направлении, противоположном уводу. При недостаточной поворачиваемости данная функция препятствует дальнейшему повороту рулевого колеса. Величина дополнительного крутящего момента небольшая (до 3 Нм), поэтому его воздействие на динамику автомобиля минимально. Функция дополнительного крутящего момента на рулевом колесе реализована с помощью электроусилителя рулевого управления.
Рассмотрим работу дополнительного принудительного угла поворота или ассистента рулевой коррекции на примере конкретной дорожной ситуации: автомобиль тормозит на дороге, правый край которой представляет собой выбоины, отремонтированные засыпанием их щебнем (рис. 10.50). Из-за разного сцепления с правой и левой стороны при торможении возникнет разворачивающий момент, который следовало бы скомпенсировать поворотом рулевого колеса в противоположную сторону, чтобы стабилизировать автомобиль на курсе.
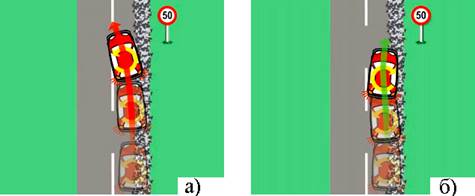
На автомобиле без дополнительного принудительного угла поворота или ассистента рулевой коррекции момент, характер и величину поворота рулевого колеса определяет только сам водитель. Неопытному водителю легко при этом совершить ошибку, например, корректировать рулём каждый раз слишком сильно, что может привести к опасному раскачиванию автомобиля и потере им стабильности (рис. 10.50, а).
На автомобиле с ассистентом рулевой коррекции усилитель рулевого управления создаёт на рулевом колесе усилия, которые «подсказывают» водителю, когда, куда и на сколько нужно его повернуть. На автомобиле с принудительным углом поворота создается дополнительный момент на рулевом колесе. В результате тормозной путь сокращается, отклонение от траектории движения уменьшается, и курсовая устойчивость автомобиля увеличивается (рис. 10.50, б).
При использовании ассистента рулевой коррекции, на примере рассмотренной выше дорожной ситуации будет зафиксирована разница тормозных давлений передних правого и левого колёс в режиме срабатывания ABS. Далее, с помощью систем контроля сцепления с дорогой будут собраны дальнейшие данные. Ассистент рассчитывает, исходя из этих данных, какой вращающий момент необходимо подать на рулевое колесо, чтобы помочь водителю выполнить необходимую коррекцию. Тем самым вмешательство в управление системы ESP ослабляется или полностью предотвращается. В соответствии с этими данными БУ ABS/ESP указывает БУ усилителя рулевого управления, какой управляющий сигнал подать на электромотор электромеханического усилителя рулевого управления. Затребованный поддерживающий вращающий момент электромеханического усилителя облегчает водителю вращение рулевого колеса в нужном для стабилизации автомобиля направлении. Вращение в неправильном направлении не облегчается и поэтому требует от водителя большего усилия. Поддерживающий вращающий момент создаётся так долго, как этого требует блок управления ABS/ESP для стабилизации автомобиля и сокращения тормозного пути.
Одним из направлений улучшения динамики автомобиля является поворот (подворот) задних колес в ту же сторону, что и передних, что позволяет сохранить направление и скорость движения центра масс автомобиля, а также значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость
Одной из важных систем ориентирования автомобиля является система помощи движению по полосе (другие наименования – ассистент движения по полосе, система удержания полосы движения) помогает водителю придерживаться выбранной полосы движения и тем самым, предотвращать аварийные ситуации. Система эффективна при движении по автомагистралям и обустроенным федеральным дорогам, т.е. там, где имеется качественная дорожная разметка.
Различают два вида систем помощи движения по полосе: пассивные и активные. Пассивная система предупреждает водителя об отклонении от выбранной полосы движения. Активная система наряду с предупреждением производит корректировку траектории движения.
У разных автопроизводителей система удержания полосы движения имеет свои торговые названия, но предлагаемые системы имеют, в основном, схожую конструкцию:
Lane Assist от Audi, Volkswagen, SEAT;
Lane Departure Warning System от BMW, Citroen, Kia, Ceneral Motors, Opel, Volvo;
Lane Departure Prevention от Infiniti;
Lane Keep Assist System от Honda, Fiat;
Lane Keeping Aid от Ford;
Lane Keeping Assist от Mercedes-Benz;
Lane Keeping Support System от Nissan;
Lane Monitoring System от Toyota.
Система помощи движению по полосе является электронной системой и включает клавишу управления, видеокамеру, блок управления и исполнительные механизмы. С помощью клавиши управления производится включение системы. Клавиша может располагаться на рычаге переключения указателей поворота, панели приборов или центральной консоли.
Видеокамера производит запись изображения на определенном расстоянии от автомобиля и его оцифровку. В системе используется монохромная камера, которая распознает линии разметки как резкое изменение градации серого. Камера объединена с блоком управления. Объединенный блок располагается на лобовом стекле за зеркалом заднего вида.
Исполнительными устройствами системы помощи движения по полосе являются контрольная лампа, звуковой сигнал, вибромотор на рулевом колесе, нагревательный элемент лобового стекла, электродвигатель электромеханического усилителя руля.
Во время работы активной системы помощи движения по полосе реализуются следующие основные функции:
распознавание траектории полосы движения;
визуальное информирование о работе системы;
корректировка траектории движения;
предупреждение водителя.
Обстановка перед автомобилем проецируется на светочувствительную матрицу камеры и преобразуется в черно-белое изображение, которое анализируется электронным блоком управления.
Алгоритм работы блока управления определяет положение линий разметки полосы, оценивает качество распознавания разметки, вычисляет ширину полосы и ее кривизну, рассчитывает положение автомобиля на полосе. На основании проведенных вычислений осуществляются управляющее воздействие на рулевое управление (тормозную систему), и, если требуемый эффект удержания автомобиля на полосе не достигается — предупреждается водитель (вибрация рулевого колеса, звуковой и световой сигналы).
Пассивная система помощи движению по полосе использующая видеокамеру. Слежение за разметкой, задающей границы полосы, осуществляется с помощью видеокамеры. Окно камеры расположено в области ветрового стекла, которая очищается щётками стеклоочистителей, что позволяет свести к минимуму ограничение видимости, вызываемое осадками в виде дождя и снега.
Если система распознаёт линии разметки полосы движения по обеим её сторонам, она находится в рабочем состоянии (активирована), о чем свидетельствует зеленая лампа подсветки.
Если автомобиль приближается к одной из линий разметки и может выйти за пределы полосы, водитель предупреждается об этом посредством вибрации рулевого колеса.
Если при активированном ассистенте перед перестроением на другую полосу будет включён сигнал поворота, предупредительного сигнала не последует, поскольку данное перестроение система воспринимает как запланированное. Предупреждение посредством вибрирующего сигнала при приближении к отслеживаемой линии разметки или при её пересечении производится только один раз. Второй предупредительный сигнал следует лишь в том случае, если после первого сигнала автомобиль удаляется на достаточное расстояние от отслеживаемой линии разметки и после этого снова приближается к ней.
Активная система помощи движению по полосе использующая видеокамеру. С внедрением электромеханического усилителя рулевого управления и электронной педали акселератора открылись новые возможности для непосредственного и активного влияния на ходовые качества и на повышение безопасности движения, а также для обеспечения активной помощи водителю в ходе выполнения им сложных манёвров. В автомобильную технику пришли функции, которые до этого были прерогативой либо живых существ, либо амбициозных проектов робототехники – оптическое восприятие ситуации (зрение), оценка ситуации (мышление) и реакция на ситуацию (действие).
В связи с этим дальнейшим развитием системы помощи движению по полосе является возможность электронной системы автомобиля вмешиваться в рулевое управление в критических ситуациях. На основании оптических данных электронная система определяет траекторию дороги и активно вмешивается в рулевое управление, если существует опасность непреднамеренного выхода автомобиля за пределы полосы движения, ограниченной внутренней и внешней полосами дорожной разметки.
Система помощи движению по полосе при наличии электромеханического усилителя рулевого управления и электронной педали акселератора может выполнять следующие функции:
● Распознавание траектории полосы движения при наличии линий дорожной разметки или достаточного контраста между дорожным покрытием и обочиной.
● Предоставление водителю визуальной информации о режиме работы ассистента движения по полосе.
● Корректирующее или вспомогательное вмешательство в работу рулевого управления.
● Предупреждение водителя путём ощутимой вибрации, если вмешательства системы движения по полосе недостаточно, чтобы компенсировать уход с полосы движения.
● Подача визуальных и звуковых сигналов, если водитель на определённое время отпустил рулевое колесо (распознавание отпущенного рулевого колеса).
● Подавление функций системы при преднамеренной смене полосы движения, например, при манёвре обгона.
После включения системы помощи движению по полосе система с помощью установленной в блок управления ассистента движения по полосе камеры начинает распознавать и оценивать обстановку на дороге перед автомобилем. При этом блок управления системы пытается на основании входных оптических данных определить границы полосы движения, осевую линию разметки и положение собственного автомобиля на полосе движения. Если системе удаётся в рамках системных границ получить эти данные, то она остаётся в активном режиме. В противном случае система переходит в пассивный режим. Индикация текущего режима работы системы осуществляется с помощью контрольной лампы (активный режим – зеленый цвет, пассивный режим – желтый цвет).
В активном режиме работы система определяет траекторию дороги и при опасности выхода автомобиля за пределы полосы движения создаёт корректирующий крутящий момент поворота рулевого колеса с помощью привода электромеханического усилителя рулевого управления. В пассивном режиме работы камера продолжает слежение за дорогой, а система анализирует поступающие данные, чтобы при распознавании однозначно идентифицируемой дорожной разметки или при наличии всех необходимых рамочных условий снова переключиться в активный режим работы. Контрольная лампа сообщает водителю о том, что система находится в пассивном режиме и корректирующее воздействие на рулевое управление и подача предупредительных сигналов не производятся. При преднамеренной смене полосы движения, например, при обгоне или повороте, включение указателей поворота временно переводит систему в пассивный режим работы. Он автоматически включается при выключении указателей поворота и при повторном распознавании однозначно идентифицируемой дорожной разметки.
На прямом участке дороги на основании распознанной дорожной разметки ассистент движения по полосе рассчитывает виртуальную полосу движения, по которой разрешено движение автомобиля (рис. 10.51, а). Дополнительно система определяет положение самого автомобиля относительно траектории этой виртуальной полосы. При возникновении опасности выхода автомобиля за пределы виртуальной полосы движения система рассчитывает корректирующий подруливающий момент, противодействующий отклонению автомобиля от полосы и равный максимум 3 Нм, и реализует его через электромеханический усилитель рулевого управления (рис. 10.51, б).
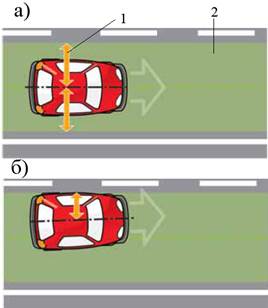
Сила корректирующего воздействия зависит от угла, под которым автомобиль приближается к распознанной границе полосы движения. Корректирующее подруливание действует максимум в течение 100 секунд или прекращается, если автомобиль в пределах этого временного отрезка возвращается на траекторию полосы движения. Водитель может в любое время без особых усилий преодолеть корректирующее воздействие активным рулением, например, при преднамеренной смене полосы движения без включения указателей поворота. Если момента, корректирующего подруливания недостаточно, чтобы удержать автомобиль в пределах полосы движения, то электродвигатель электромеханического усилителя рулевого колеса возбуждает вибрацию рулевого механизма, ощущаемую водителем в качестве предупредительного сигнала.
При движении автомобиля в повороте, даже при затяжных поворотах, то есть при большом радиусе поворота ассистент движения по полосе способен предотвращать отклонение автомобиля от расчётной полосы движения. При этом виртуальная полоса движения рассчитывается системой так, чтобы внутренняя граница виртуальной полосы совпадала с распознанной реальной дорожной разметкой полосы движения с внутренней стороны поворота. Если максимального времени корректирующего вмешательства в 100 секунд недостаточно для удержания автомобиля в пределах полосы движения на повороте, то включается сигнализация с помощью вибрации, раздаётся предупредительный звуковой сигнал, а также появляется текстовое сообщение на дисплее комбинации приборов, призывающие водителя взять рулевое управление на себя.
Наряду с контролем за движением автомобиля в пределах полосы система также следит за тем, не отпустил ли водитель рулевое колесо на определённый период времени и тем самым оказался не готов к рулению, например, вследствие усталости или из-за отвлекающих действий.
При движении автомобиля неровности дорожного покрытия создают усилия, воспринимаемые рулевым механизмом. Если водитель удерживает рулевое колесо как минимум одной рукой, указанные выше силы приводят к тому, что через шестерню рулевой колонки на нижний конец торсиона воздействуют постоянно меняющиеся моменты, пытающиеся повернуть рулевую колонку на небольшую величину. Поскольку водитель удерживает рулевое колесо, то верхний конец торсиона остаётся неподвижным. При этом торсион постоянно скручивается влево и вправо на небольшой угол. Эти непрерывные изменения угла скручивания торсиона измеряются с помощью датчика момента поворота рулевого колеса и в результате обработки сигнала в блоке управления усилителя рулевого управления возникает непрерывная последовательность сигналов, которая не прекрщается, пока водитель удерживает рулевое колесо и не производит намеренного руления. Наличие серии таких сигналов сообщает ассистенту движения по полосе о том, что водитель удерживает рулевое колесо.
Если водитель отпускает рулевое колесо, то верхний конец торсиона перестаёт быть неподвижным. Весь рулевой механизм, включая рулевое колесо, может свободно вращаться. Теперь, в отличие от положения удержания водителем рулевого колеса, крутящие моменты, возникающие из-за неровностей дорожного покрытия, не приводят к переменному скручиванию торсиона, так что датчик крутящего момента не регистрирует никаких изменений угла скручивания. Последовательность сигналов отсутствует. Если система обнаруживает, что это состояние длится более 8 секунд, то включается предупредительный сигнал, указывающий водителю на опасность, могущую возникнуть в результате отпускания рулевого колеса.
Система помощи движению по полосе предназначена для использования при движении по магистралям и шоссе. Поэтому он работает при скорости свыше 65 км/ч. В неблагоприятных условиях, например, при загрязнённом или заснеженном дорожном полотне, при слишком узкой полосе движения или при неоднозначной разметке полос, как это имеет место на ремонтных участках магистралей, ассистент временно деактивируется.
Дополнительно можно посмотреть фильм 10.8.
Парковочная система (другое наименование – система помощи при парковке, обиходное название – парктроник) является вспомогательной системой активной безопасности автомобиля, облегчающей процесс парковки автомобиля. Наибольшая эффективность от применения парковочной системы реализуется при движении автомобиля задним ходом, в темное время суток, при сильной тонировке стекол, а также в стесненных условиях (парковка, гараж и др.).
Парковочные системы можно условно разделить на две большие группы – пассивные (предупреждающие) и активные (автоматические). Пассивные парковочные системы представляют только необходимую для парковки информацию, при этом управление автомобилем осуществляется водителем. Активные парковочные системы обеспечивают парковку автомобиля в автоматическом или автоматизированном (автоматически выполняются отдельные функции) режиме.
Пассивные парковочные системы устанавливаются на автомобиль при покупке в качестве опции или отдельно. На один автомобиль может быть установлено несколько пассивных парковочных систем. В основу работы пассивных парковочных систем положен контроль расстояния до препятствия и информирование водителя об этом.
Предупреждающие системы. Парковочный радар (Парктроник) (рис. 10.52) состоит из ультразвуковых датчиков, цифрового блока управления и LED дисплея. Система оценивает расстояние между автомобилем и препятствием, находящимся напротив ультразвуковых датчиков, установленных на заднем бампере автомобиля. Система имеет звуковое сопровождение, которое помогает лучше ориентироваться при парковке.
В качестве питания парктроника обычно используют питание фары заднего хода. Парктроник будет автоматически включаться при включении задней передачи.
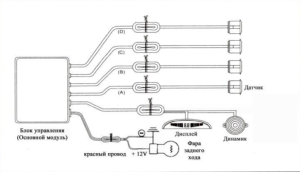
Звуковая система представляет собой систему, позволяющую водителю по звуковым сигналам, находящемся на рабочем месте водителя оценить расстояние до ближайшего препятствия. Система состоит из нескольких датчиков (рис. 10.53) (передающих и принимающих) в переднем и заднем бампере автомобиля, основного блока управления, блока управления дисплея, зуммеров, дисплея.
Датчик выполнен из алюминиевого корпуса с селективной степенью затухания пьезоэлектрической пластины в качестве генератора сигналов и снабжен электронной схемой для генерирования ультразвуковых волн и оценки отраженных и принимаемых волн.
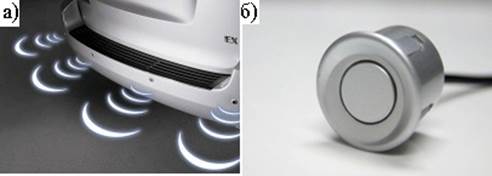
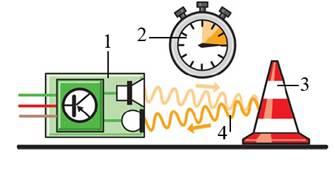
Ультразвуковые датчики представляют собой небольшие приёмопередающие модули (рис. 10.54). Принцип работы датчиков базируется на излучении ультразвукового сигнала, неслышного для человека. Этот сигнал распространяется в виде звуковых волн в окружающей среде с постоянной скоростью. Звуковые волны представляют собой происходящие концентрические волнообразные изменения плотности и давления частиц окружающего воздуха. Скорость распространения звука зависит от плотности среды, в которой он движется. При нормальном давлении и температуре 20 °C звук распространяется в воздухе со скоростью 343 м/с. Зависимость скорости распространения звука от температуры является основанием для использования системой управления сигнала от датчика наружной температуры в качестве корректирующей величины. Звуковые волны, попадая на предмет (например, на стену), отражаются от него в степени, зависящей от характеристик предмета. Это означает, что звуковые волны возвращаются к датчику и принимаются его микрофоном. При этом датчик измеряет время, прошедшее между отправкой сигнала и приёмом отражённых волн. На основании измерения этого времени блок управления может определить расстояние от автомобиля до предмета.
Передаваемые уровни соответствуют напряжению логической схемы и, следовательно, нечувствительны к возмущению, поэтому отсутствует необходимость в экранировании сигнальных линий.
Датчики включаются циклически каждые 25 мс и генерируют ультразвуковой импульс продолжительностью примерно 1 мс. Все датчики затем переключаются на режим «прослушивания», для того чтобы воспринимать отраженные волны. Расстояние до препятствия, от которого отражаются волны, вычисляется посредством оценки длительности прохождения сигнала (длительности прохождения волн от передатчика до принимающего датчика). Кратчайшее расстояние от препятствия до бампера показывается водителю на дисплее.
При движении вперед со скоростью ниже 15 км/час работают только датчики, расположенные на переднем бампере. Во время переключения на передачу заднего хода приводятся в действие датчики на заднем бампере.
Блок управления системы служит для подачи напряжение питания к датчикам, оценки и обработки сигналы датчиков, управления предупреждающими зуммерами, передачи блоку управления передней панели управления, индикации и выдачи информации данные, необходимые для вывода изображения на дисплей.
Звуковой сигнал подается предупреждающими зуммерами. Расстояние, на котором датчики парковочной системы однозначно различают препятствия, зависит от места их установки.
Прерывистый сигнал становится непрерывным, когда расстояние до препятствия сокращается до 25…35 см.
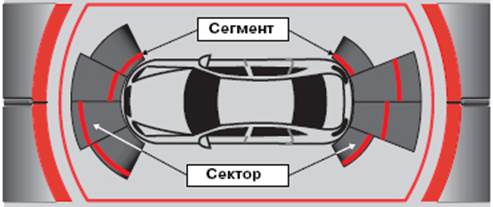
При наличии дисплея в дополнение к звуковому предупреждению на дисплее отображается фактическое расстояние от отдельных датчиков до имеющихся препятствий. В более простых системах расстояние до препятствия отображается в цифрах. В более сложных конструкциях контролируемая зона разбита на секторы по числу датчиков (рис. 10.55). В каждом из секторов имеется красная метка, которая отмечает расстояние между датчиком и ближайшим к нему препятствием. Когда расстояние между автомобилем и препятствием сокращается, соответствующая красная метка на экране приближается к автомобилю.
Отдельные автомобили могут оснащаться камерой заднего вида, позволяющей контролировать ситуацию позади автомобиля, передавая изображение на дисплей. Камера встраивается в ручку двери багажного отсека и позволяет водителю видеть то, что происходит сзади. Изображение с камеры появляется на дисплее автоматически при включении передачи заднего хода.
Парковочный ассистент и камера заднего вида лишь помогают водителю в обзоре пространства вокруг автомобиля и оценке расстояния до препятствий, поэтому впоследствии стали применять более совершенные системы парковки.
Следующим поколением развития парковочных систем являются активные парковочные системы.
Система автоматической парковки. Система автоматической парковки (другое наименование — интеллектуальная система помощи при парковке, обиходное название – парковочный автопилот) относится к активным парковочным системам, т.к. обеспечивает парковку автомобиля в автоматическом или автоматизированном (автоматически выполняются отдельные функции) режиме.
Различные системы автоматической парковки помогают при выполнении параллельной или перпендикулярной парковки. Больше распространены системы с параллельной парковкой. Автоматическая парковка осуществляется за счет согласованного управления углом поворота рулевого колеса и скорости движения автомобиля.
При параллельной парковке (вдоль края приезжей части) система определяет место для парковки как пригодное, если оно как минимум на 0,8 м больше, чем собственная длина автомобиля (x + 0,8 м) (рис. 10.56).
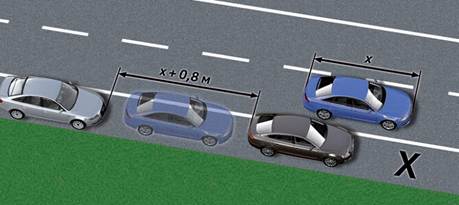
Подходящие продольные места для парковки распознаются при проезде вдоль припаркованных автомобилей, если скорость движения автомобиля ниже 40 км/ч. Подходящие места для парковки предлагаются системой, если они находятся между двумя припаркованными автомобилями или за припаркованным автомобилем. Парковка перед стоящим автомобилем системой не поддерживается.
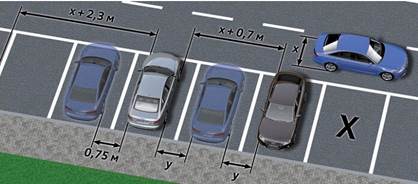
При поперечной парковке (рис. 10.57) система определяет место для парковки как пригодное если измеренная ширина места для парковки превышает ширину автомобиля не менее чем на 2,3 м (x + 2,3 м).
Подходящие поперечные места для парковки распознаются при проезде вдоль припаркованных автомобилей, если скорость движения автомобиля ниже 20 км/ч.
Место для парковки, может находиться между двумя автомобилям, за другим автомобилем или рядом с ним. Система оценивает место для парковки между двумя автомобилями как подходящее, если его ширина равна ширине автомобиля x + 0,7 м. В таком случае парковочный автопилот выровняет автомобиль по центру относительно обоих автомобилей, обеспечив до них расстояние y.
Если измеренная ширина места для парковки превышает ширину автомобиля не менее чем на 2,3 м (x + 2,3 м), то парковка выполняется рядом с одним из автомобилей на расстоянии 0,75 м от него. В этом случае автомобиль будет припаркован параллельно соседнему автомобилю.
Конструкция системы автоматической парковки включает ультразвуковые датчики, выключатель, электронный блок управления, а также исполнительные устройства систем автомобиля.
Электронный блок управления принимает сигналы от ультразвуковых датчиков и преобразует их в управляющие воздействия на исполнительные устройства, в качестве которых выступают другие системы автомобиля: курсовой устойчивости, управления двигателем, электроусилитель рулевого управления, автоматическая коробка передач. Взаимодействие с указанными системами осуществляется через соответствующие электронные блоки управления.
Парковка транспортного средства может осуществляться двумя способами – непосредственно водителем с помощью предлагаемых системой инструкций или автоматически без участия водителя. Визуальные и тестовые инструкции водителю выводятся на информационный дисплей.
Такая система осуществляет не только осмотр пространства вокруг автомобиля, но и самостоятельно поворачивает рулевое колесо с электроусилителем рулевого управления при парковке автомобиля задним ходом. Водитель при этом управляет во время парковки педалями акселератора, сцепления или тормоза. При необходимости в любой момент времени водитель может взять на себя контроль рулевого управления и прервать процесс автоматической парковки. Наряду с парковкой автомобиля задним ходом к правой стороне дороги в системе предусмотрена возможность парковки и к левой стороне дороги, например, для улиц с односторонним движением.
Парковочный автопилот является примером взаимодействия различных систем автомобиля с использованием коммуникаций по шине CAN для выполнения комплексной функции, как, например, активного руления при парковке. Наряду с парковочным автопилотом задействованы следующие подсистемы: электромеханический усилитель рулевого управления; тормозная система с ABS и ESP; управление двигателя и коробки передач; электронные составляющие приборной панели и рулевой колонки; система распознавания прицепа.
Процесс парковки задним ходом с использованием парковочного автопилота можно разделить на четыре этапа:
1. Активирование парковочного автопилота.
2. Поиск подходящего свободного места на стоянке.
3. Парковка с использованием функции руления
4. Завершение процесса парковки
Активирование парковочного автопилота. Парковочный автопилот имеет отдельные функции парковочного ассистента и самостоятельного поворота рулевого колеса при парковке. Включение и выключение этих функций осуществляется двумя разными кнопками. Сначала водитель должен решить, будет ли он самостоятельно парковать автомобиль, пользуясь при этом системой контроля дистанции при парковке, или это выполнит парковочный автопилот задним ходом, предоставив водителю управление только педалями акселератора, сцепления и тормоза. Водитель должен выбрать, будет ли он парковаться задним ходом к правой стороне дороги или же парковка будет произведена к левой стороне дороги (например, при движении по улице с односторонним движением). Возможно также самостоятельно припарковать автомобиль, а парковочный автопилот использовать лишь для поиска подходящего свободного места на парковке.
Парковка с использованием функции руления. Водитель запускает процесс автоматической парковки следующим образом: на стоящем автомобиле он включает передачу заднего хода, нажимает на педаль акселератора и отпускает педаль тормоза. При этом водитель не должен поворачивать рулевое колесо. Соответствующая индикация на дисплее комбинации приборов указывает лишь на то, что включён режим автоматического руления, и водитель должен следить за обстановкой вокруг автомобиля, чтобы в случае опасности прервать процесс парковки или завершить его вручную.
Процесс парковки автомобиля задним ходом поделён блоком управления парковочного автопилота на пять этапов. Это необходимо потому, что система не имеет возможности непосредственного визуального контроля для реагирования на индивидуальное развитие процесса. Проще говоря, в «памяти» сохранён стандартизированный процесс парковки, который при необходимости воспроизводится в пять этапов. Таким образом, парковочный автопилот поэтапно следует заранее заданной траектории.
Сначала колёса приводятся в положение прямолинейного движения и автомобиль немного проезжает назад, как только водитель нажимает на педаль акселератора и отпускает педаль тормоза (этап 1, рис. 10.58).
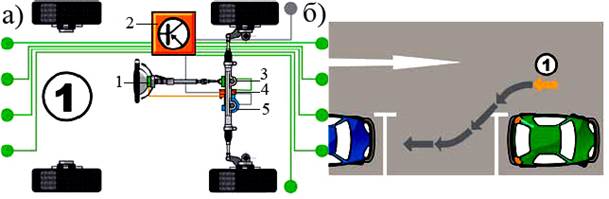
Затем от блока управления парковочного автопилота 2 на блок управления усилителя рулевого управления 4 поступает сигнал о том, что колёса необходимо повернуть вправо. При этом автомобиль задним ходом въезжает в свободное место на парковке под углом к линии припаркованных автомобилей (этап 2, рис. 10.58). Водитель должен следить за тем, чтобы скорость движения не превышала 7 км/ч. При превышении этого значения система автоматически прерывает процесс парковки.
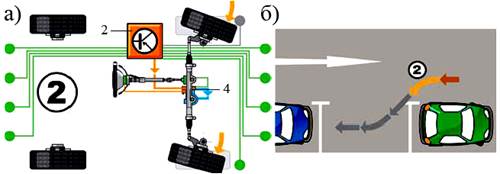
Используя данные о дистанции от ультразвуковых датчиков и сигналы, поступающие от датчика угла поворота рулевого колеса 1, парковочный автопилот контролирует положение автомобиля в свободном пространстве между припаркованными автомобилями и, руководствуясь записанными в память блока управления сегментами движения, определяет, с какого момента колёса необходимо вновь привести в положение прямолинейного движения, чтобы продолжить въезд на место для парковки
В интеллектуальной системе помощи при парковке используются ультразвуковые датчики, аналогичные пассивной парковочной системе, но имеющие большую дальность действия (до 4,5 м). Количество датчиков в зависимости от разновидности системы различается. Например, в системе Park Assist последнего поколения устанавливается 12 ультразвуковых датчиков: 4 – впереди, 4 сзади и 4 по бокам автомобиля.
Включение системы осуществляется принудительно при необходимости осуществить парковку. Для этого на панели приборов (рулевом колесе) имеется специальный выключатель.
В интеллектуальной системе помощи при парковке используются ультразвуковые датчики, аналогичные пассивной парковочной системе, но имеющие большую дальность действия (до 4,5 м). Количество датчиков в зависимости от разновидности системы различается. Например, в системе Park Assist последнего поколения устанавливается 12 ультразвуковых датчиков: 4 – впереди, 4 сзади и 4 по бокам автомобиля.
Включение системы осуществляется принудительно при необходимости осуществить парковку. Для этого на панели приборов (рулевом колесе) имеется специальный выключатель.