В автомобиле с динамическим рулевым управлением угол поворота колёс устанавливается системой ESP и динамическим рулевым управлением без участия водителя (рис. 14.31). Водитель при этом ничего не замечает, рулевое колесо остаётся в положении желаемого направления движения. Так как система ESP и динамическое рулевое управление выставляют необходимый угол поворота колёс быстрее и точнее, чем это делает водитель, то в этой дорожной ситуации, благодаря дополнительному воздействию динамического рулевого управления, получается в среднем более короткий тормозной путь, чем на автомобилях без динамического рулевого управления.
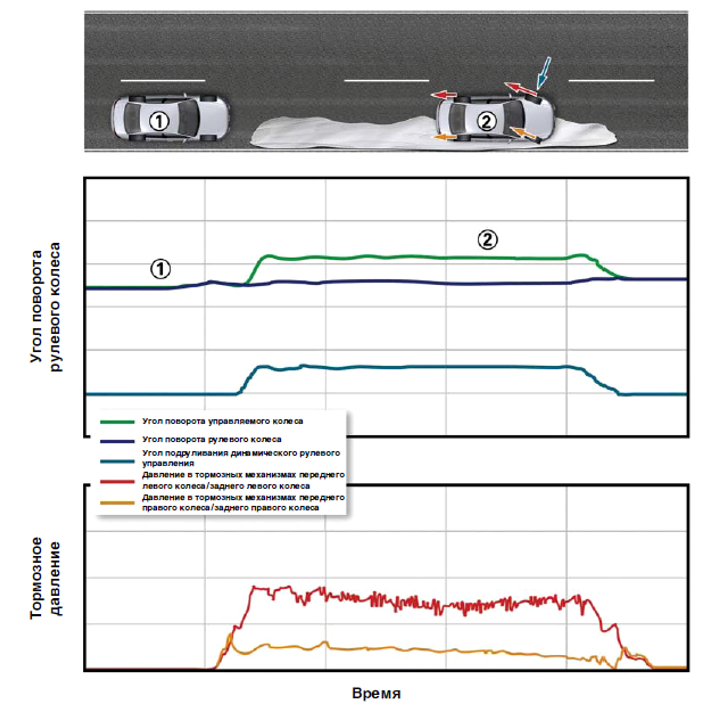
Рис. 14.31. Схема поведения автомобиля с динамическим рулевым управлением при торможении с разным коэффициентом трения под левыми и правыми колёсами:
1, 2 – фазы реализации стабилизации управления автомобилем
Реализация изменяемой характеристики осуществляется с помощью дополнительного электромеханического привода вала-шестерни 3 рулевого механизма, который преобразовывает заданный водителем угол поворота рулевого вала (рис. 14.32). Механическая связь между рулевым колесом и управляемыми колёсами осуществляется через суммирующий механизм.
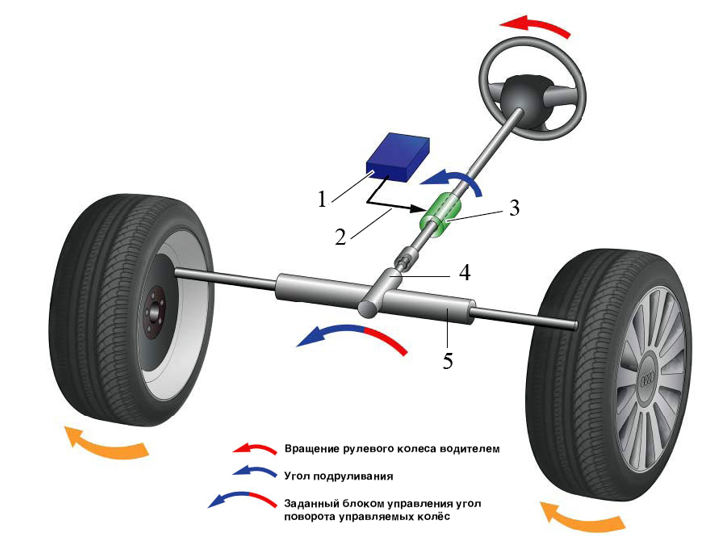
Рис. 14.32. Общая схема система динамического рулевого управления Audi:
1– блок управления; 2 – управляющий сигнал; 3 – электромеханический привод; 4 – вал-шестерня; 5 – рулевой механизм
Необходимость увеличения или уменьшения угла поворота управляемых колёс определяется блоком управления 1. Блок управления управляет электродвигателем, который приводит один из элементов суммирующего механизма. Блок управления рассчитывает необходимый угол подруливания для изменения передаточного отношения рулевого механизма. Основными параметрами для проведения расчёта являются скорость движения и заданный водителем угол поворота рулевого колеса.
Угол поворота колёс равен сумме угла подруливания, заданного суммирующим механизмом, и угла поворота рулевого колеса, заданного водителем. Суммирующий механизм позволяет:
– увеличить угол поворота колёс, заданный водителем поворотом рулевого колеса (подруливание в направлении поворота);
– уменьшить угол поворота колёс, заданный водителем поворотом рулевого колеса (подруливание в противоположном направлении);
– повернуть колёса без поворота рулевого колеса водителем.
Суммирующий (исполнительный) механизм предназначен для корректировки угла поворота управляемых колёс. Он приводит во вращение вал-шестерню рулевого механизма. Суммирующий механизм представляет собой волновой редуктор, один из элементов которой приводится электродвигателем. Характерной особенностью этого механизма является преобразование высокой частоты вращения ротора электродвигателя в низкую.
Общий принцип работы волнового редуктора состоит в том, что в зацеплении находятся две шестерни с различным числом зубьев. В применённом для создания динамического рулевого управления механизме электродвигатель приводит шестерню со 100 зубьями, которая входит в зацепление с шестерней, имеющей 102 зуба.
Рулевой вал, напрямую связанный с рулевым колесом, при динамическом рулевом управлении также связан с валом-шестерней рулевого механизма (рис. 14.33).
Связь осуществляется через волновой редуктор. Гибкий стакан 2 посажен на шлицы верхней части рулевого вала 4 (с которой напрямую также связано рулевое колесо). Гибкий стакан является чашеобразной деталью с тонкими и потому гибкими, упругодеформируемыми стенками. На его корпусе имеется наружный зубчатый венец из 100 зубьев. Гибкий стакан входит в зацепление с колесом 1 с внутренним зубчатым венцом из 102 зубьев. Это колесо жёстко связано с нижней частью рулевого вала и через неё с валом-шестернёй. При повороте рулевого колеса гибкий стакан и втулка поворачиваются вместе, т. к. связаны зубчатым соединением (соединение работает как шлицевое типа вал-ступица). При такой схеме работы рулевой механизм работает обычным образом (без изменения передаточного отношения).
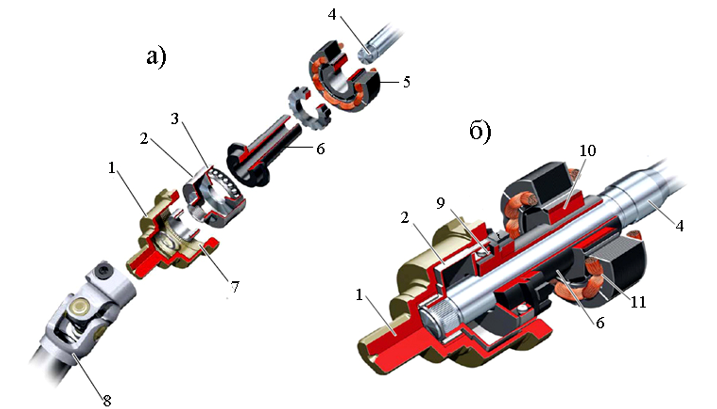
Рис. 14.33. Электромеханический привод рулевого управления Audi:
а – общий вид; б – исполнительный механизм; 1 – колесо с внутренним зубчатым венцом (корпус волнового редуктора); 2 – гибкий стакан; 3 – наружный зубчатый венец; 4 – верхняя часть рулевого вала, связывающая рулевое колесо и гибкий стакан; 5 – электродвигатель; 6 – полый вал; 7 – внутренний зубчатый венец; 8 – нижняя часть рулевого вала; 9 – внутреннее кольцо подшипника; 10 – ротор электродвигателя; 11 – статор электродвигателя
В корпусе исполнительного механизма размещён полый вал 6. Полый вал приводится во вращение электродвигателем 5 и вращается независимо от верхней части рулевого вала, на которую он надет. Для этого ротор электродвигателя жёстко закреплён на одном конце полого вала.
На другой конец полого вала насажено внутреннее кольцо подшипника качения 9, являющееся корпусом волнового редуктора. Внутреннее кольцо подшипника выполнено не совсем круглым. Оно формирует эксцентрическую (овальную) беговую дорожку для элементов качения — шариков (рис. 14.34)
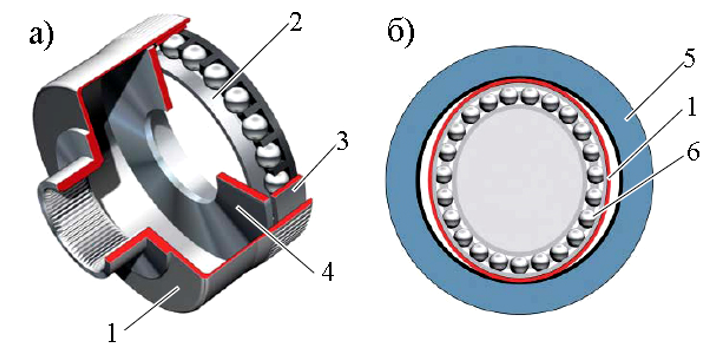
Рис. 14.34. Волновой редуктор:
а – общий вид; б – схема; 1 – корпус волнового редуктора (колесо с внутренним зубчатым венцом); 2 – внутреннее кольцо подшипника; 3 – наружное кольцо подшипника; 4 – крышка подшипника; 5 – колесо с внутренним зубчатым венцом; 6 – подшипник
Наружное кольцо подшипника является гибкой стальной обоймой. Эксцентрическая форма внутреннего кольца подшипника передаётся наружному кольцу (вместе они образуют так называемый генератор волн возмущения). На наружное кольцо подшипника с лёгким натягом посажен гибкий стакан. Тонкие стенки гибкого стакана повторяют эксцентрическую форму подшипника. Наружный зубчатый венец гибкого стакана из-за своего эксцентриситета находится не по всей своей поверхности в зацеплении с круглым внутренним зубчатым венцом колеса. Работающий электродвигатель приводит во вращение полый вал. Вместе с ним вращается внутреннее кольцо подшипника качения, имеющее эксцентрическую форму. Из-за различного количества зубьев на венцах гибкого стакана и колеса с внутренним венцом зубья венца гибкого стакана несколько смещаются относительно впадин венца колеса. Зуб венца гибкого стакана смещается к боковой поверхности зуба внутреннего венца колеса. Вследствие этого на боковую поверхность зуба внутреннего венца колеса воздействует усилие, что приводит к минимальному повороту колеса. Вращение генератора волн деформации (подшипника с эксцентриситетом) при работе электродвигателя последовательно вводит в зацепление все зубья венца гибкого стакана. Возникает непрерывное вращательное движение колеса с внутренним венцом и связанной с ней вал-шестерни. Изменяется угол поворота управляемых колёс. Достигаемое при этом понижение числа оборотов электродвигателя (относительно числа оборотов вала-шестерни) составляет примерно 50:1.
Производители автомобилей BMW в конструкции своих автомобилей с активным рулевым управлением применяют суммирующий механизм, представляющий собой сдвоенный планетарный редуктор, которой приводится электродвигателем (рис. 14.35).
Корпус редуктора может поворачиваться с помощью специального электродвигателя по команде электронного блока управления. В зависимости от скорости движения автомобиля электронный блок управления меняет передаточное отношение рулевого механизма – увеличивая усилия при движении на шоссе и уменьшая при парковке. В последнем случае, изменяя передаточные отношения редуктора, уменьшается необходимость поворота рулевого колеса на большие углы.
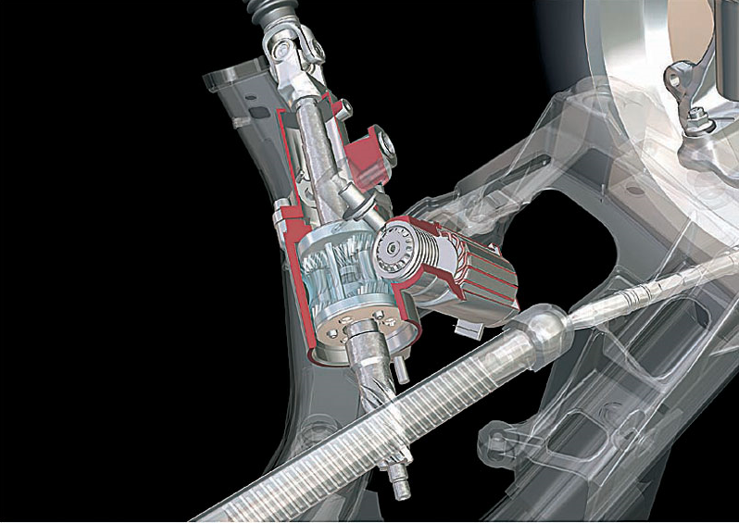
Рис. 14.35. Электромеханический привод рулевого управления BMW
Планетарный механизм встроен в разрез рулевого вала. Если не работает электродвигатель, то сателлиты соединяют шестерню рулевого механизма и вал напрямую. Если электродвигатель работает, через «червяк» он поворачивает эпициклическую шестерню и в зависимости от направления движения, или уменьшает, или увеличивает угловую скорость вала. Вращение эпициклической шестерни в одну или другую сторону позволяет увеличить или уменьшить передаточное число планетарной передачи, чем достигается изменение передаточного отношения рулевого механизма.
Система активируется при запуске двигателя. При совершении маневров на низкой скорости в соответствии с сигналом датчика угла поворота рулевого колеса включается электродвигатель. Вращение шестерни в определенном направлении с максимальной скоростью обеспечивает наименьшее передаточное отношение рулевого механизма, которое достигает значения 1:10. При этом руль становиться острым, уменьшается число оборотов рулевого колеса от упора до упора, чем достигается высокий комфорт в управлении.
С ростом скорости движения выполнение поворотов сопровождается уменьшением частоты вращения электродвигателя, соответственно увеличивается передаточное отношение рулевого механизма. На скорости 180-200 км/ч передаточное отношение достигает оптимального значения 1:18. Электродвигатель при этом перестает вращаться, а усилие от рулевого колеса передается на рулевой механизм напрямую. С дальнейшим ростом скорости электродвигатель снова включается, при этом вращение производится в противоположную сторону. Передаточное отношение рулевого механизма может достигать величины 1:20. При данном передаточном отношении рулевое управление обладает наименьшей остротой, увеличивается число оборотов рулевого колеса от упора до упора, тем самым обеспечивается безопасность маневрирования на высоких скоростях.
Сравнивая описанные конструкции активного рулевого управления можно ответить, что у волнового редуктора по сравнению с планетарным редуктором есть несколько преимуществ. Во-первых, благодаря малой разнице диаметра шестерен, в зацеплении одновременно участвует множество зубцов, что позволяет волновой передаче передавать крутящий момент в несколько раз больший, чем планетарной с теми же габаритами и массой.
Устойчивость и управляемость автомобиля при поворотах во многом зависит от направления следования задней оси по колее передней. Это необходимо для уменьшения угла поворота автомобиля и износа его шин. Применение управляемой задней оси позволяет уменьшать поперечные ускорения при повороте автомобиля, что повышает его устойчивость. Системы управления всеми четырьмя колесами значительно улучшают маневрирование автомобилем. Во-первых – повышается чувствительность автомобиля к повороту рулевого колеса. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление, чтобы не вращать рулевое колесо на несколько оборотов при каждом маневре. На автостраде же «острые» рулевое управление может вызвать проблемы – автомобиль будет слишком резко реагировать даже на небольшие подруливания. Во-вторых – улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях, то есть уменьшить радиус поворота. И в-третьих – повысить курсовую устойчивость при резких маневрах на высокой скорости.
Одним из направлений улучшения динамики автомобиля является поворот (подворот) задних колес в ту же сторону, что и передних, что позволяет сохранить направление и скорость движения центра масс автомобиля, а также значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость
При движении на малой скорости задние колеса поворачиваются в противофазе с передними (рис. 14.36), и мгновенный радиус поворота уменьшается, а при движении на большой скорости в быстром вираже или при перестроении из ряда в ряд на автостраде, задние колеса, наоборот, будут поворачиваться на небольшой угол в ту же сторону, что и передние. К примеру, автомобиль, совершая маневр на автостраде, будет словно не поворачивать, а переходить из ряда в ряд параллельно полосам разметки. Автомобиль при этом будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий автомобиль вокруг вертикальной оси, будет меньше – стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси.
В связи с этим некоторые производители вносят в конструкцию автомобиля управление задней осью.
При избыточной поворачиваемости колеса поворачиваются в противоположную сторону, при недостаточной поворачиваемости поворотом колес достигается потерянное сцепление с дорогой. В большинстве случаев вмешательство в работу рулевого управления позволяет стабилизировать автомобиль без снижения скорости движения.
При прохождении поворота автомобиль поворачивается вокруг так называемого мгновенного центра вращения «M». У обычных автомобилей он находится на продолжении заднего моста.
При подруливании задними колесами на скорости до 60 км/ч они поворачиваются в направлении, противоположном повороту (рис.14.36). Результатом подруливания задними колесами становится смещение точки вращения к центральной оси автомобиля при тех же затрачиваемых водителем усилиях. В плане маневренности и динамики это соответствует автомобилю с более короткой колесной базой.
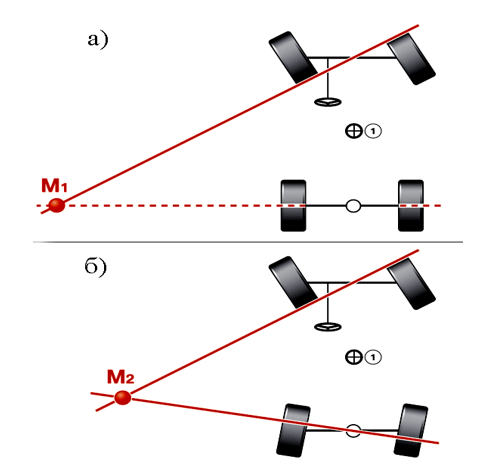
Рис. 14.36. Подруливание задних колес на низких скоростях:
а – поворот при традиционной системе рулевого управления; б – поворот при системе рулевого управления с подворотом задних колес; M1 мгновенный центр вращения 1; M2 – мгновенный центр вращения 2; 1 – центральная ось автомобиля
С увеличением скорости движения вмешательство активного рулевого управления, а именно передаточное отношение рулевого управления, уменьшается. При этом изменяется стратегия интегрального активного рулевого управления. В то время как на низких скоростях задние колеса поворачиваются в сторону, противоположную направлению поворота, на высоких скоростях они поворачиваются в одном направлении с передними колесами (рис. 14.37). Мгновенный центр вращения при этом уходит назад, что соответствует автомобилю с более длинной колесной базой и обеспечивает стабилизацию при прямолинейном движении. Радиус поворота становится больше.
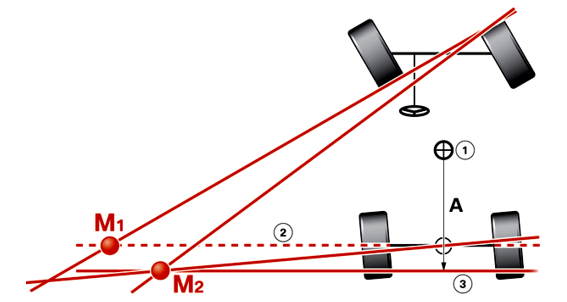
Рис. 14.37. Подруливание задних колес на высоких скоростях:
а – поворот при традиционной системе рулевого управления; б – поворот при системе рулевого управления с подворотом задних колес; M1 мгновенный центр вращения 1; M2 – мгновенный центр вращения 2; 1 – центральная ось автомобиля; 2 – прямая, проведенная через заднюю ось; 3 – точка вращения дальше от центральной оси автомобиля; A – виртуальное удлинение колесной базы
За счет соединения с активным рулевым управлением на переднем мосту образуется дополнительный угол поворота, и радиус поворота, а также необходимый поворот руля остаются на привычном уровне. В итоге благодаря координации вмешательств активного рулевого управления на переднем и заднем мостах перестроение происходит увереннее без ущерба для маневренности.
Объединение активного рулевого управления с подруливанием задними колесами дает преимущество во всех скоростных режимах.
При резком торможении на дороге, одна половина которой скользкая, автомобиль начинает рыскать, уклоняясь от курса в сторону с менее скользким покрытием. В этом случае водитель обычного автомобиля должен принять соответствующие контрмеры, например, поворотом рулевого управления.
При раздельном торможении регулятор динамики создает стабилизирующий момент вращения автомобиля вокруг вертикальной оси за счет поворота задних колес в сторону, противоположную направлению поворота передних колес (рис. 14.38).
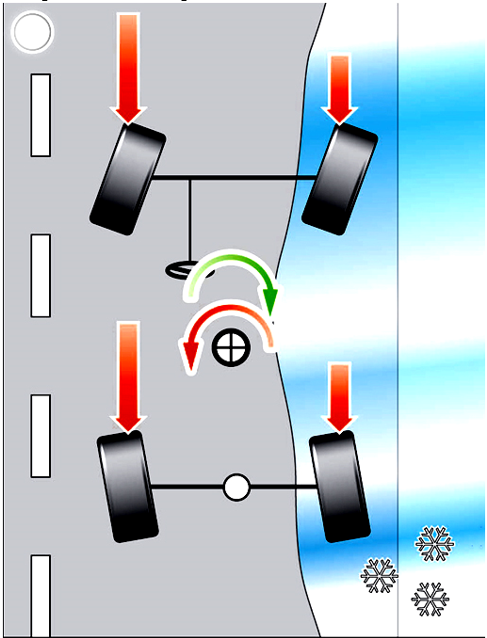
Рис. 14.38. Торможение автомобиля подворотом задних колес и интегральным активным рулевым управлением
При таком так называемом раздельном торможении регулятор динамики создает стабилизирующий момент вращения автомобиля вокруг вертикальной оси за счет поворота задних колес в сторону, противоположную направлению поворота передних колес. Это компенсирует рысканье автомобиля из-за однобокого воздействия тормозных усилий.
Примером подворота задней оси может служить электронно-управляемая задняя ось автомобиля Toyota Aristo, которая в 1991 году сменила механическую, общий вид которой показан на рис. 14.39, а схема исполнительного механизма на рис. 14.40.
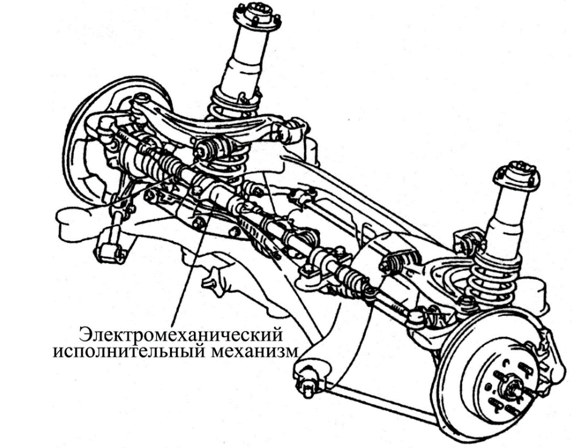
Рис. 14.39. Общий вид управляемой задней осью с электромеханическим исполнительным механизмом Toyota Aristo
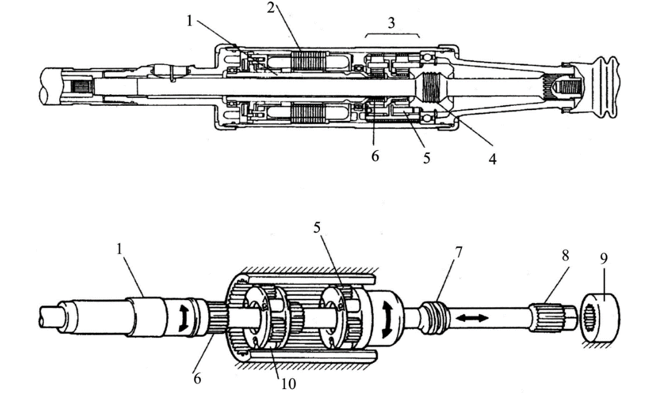
Рис. 14.40. Электромеханический исполнительный механизм поворота задней оси Toyota Aristo:
1 – ротор (пустотелый вал); 2 – статор; 3 – планетарная коробка передач; 4 – гайка шпинделя; 5 – сателлит; 6 – солнечная шестерня; 7 – шпиндель (винт); 8 – шлицевая часть вала шпинделя; 9 – предохранитель от прокручивания шпинделя; 10 – водило планетарной передачи
Задние колеса здесь поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес и т. д.
Исполнительный механизм состоит из электродвигателя (статора и ротора), планетарной передачи и вала шпинделя, воздействующего на рулевые тяги задней оси. Управление электродвигателем осуществляется от электронного блока управления, воспринимающего сигналы от различных датчиков рулевого управления. В зависимости от величины и времени подачи напряжения на электродвигатель изменяется скорость и время вращения ротора электродвигателя. Для увеличения крутящего момента и толкающих сил шпинделя в исполнительном механизме применяется планетарная передача.
При подаче напряжения на электродвигатель пустотелый вал ротора 1 начинает вращаться. На валу ротора имеется солнечная шестерня 6, которая через сателлиты 5 и водило 10 планетарной передачи приводит во вращения связанную с ним гайку шпинделя 4. Вал шпинделя, установленный внутри пустотелого вала ротора через винт 7 начинает совершать возвратно-поступательные движения, воздействуя на рулевые тяги задней оси. Для исключения прокручивания вала шпинделя предусмотрен специальный предохранитель 10.
Работает система 4WS в двух режимах. На малой скорости задние колеса поворачиваются в сторону, противоположную передним, и при маневре той же кривизны рулевое колесо нужно будет вращать на меньший угол. Это повышает чувствительность рулевого управления и автомобиль становится более маневренным. К примеру, при развороте передние колеса будут вывернуты до упора влево, а задние – вправо на угол до восьми градусов. Радиус разворота при этом уменьшится на 15% по сравнению с обычным автомобилем и составит всего 4,7 метра.
Подобная система применяется также и в автомобилях BMW (рис. 14.41).
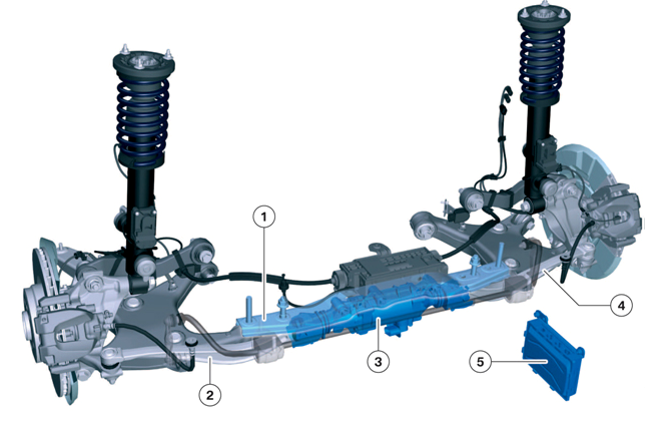
Рис. 14.41. Общий вид управляемой задней осью с электромеханическим исполнительным механизмом BMW:
1 – несущая перегородка; 2 – левый рычаг контроля схождения; 3 – исполнительный электромеханический механизм поворота задней оси; 4 – правый рычаг контроля схождения; 5 – блок управления исполнительным механизмом
Специальный электромеханический исполнительный механизм 3 для подруливания задними колесами размещен под несущей перегородкой 1 на балке заднего моста. Механизм находится между рычагами контроля схождения 2 и 4. Контроль за работой механизма осуществляется блоком управления 5.
Электромеханический исполнительный механизм поворота задней оси состоит из электродвигателя 5 (рис. 14.42), перемещающего рычаги контроля схождения через винтовой вал 3. Механизм рассчитан на максимальный ход ± 8 мм, что соответствует повороту колеса на ± 3º.
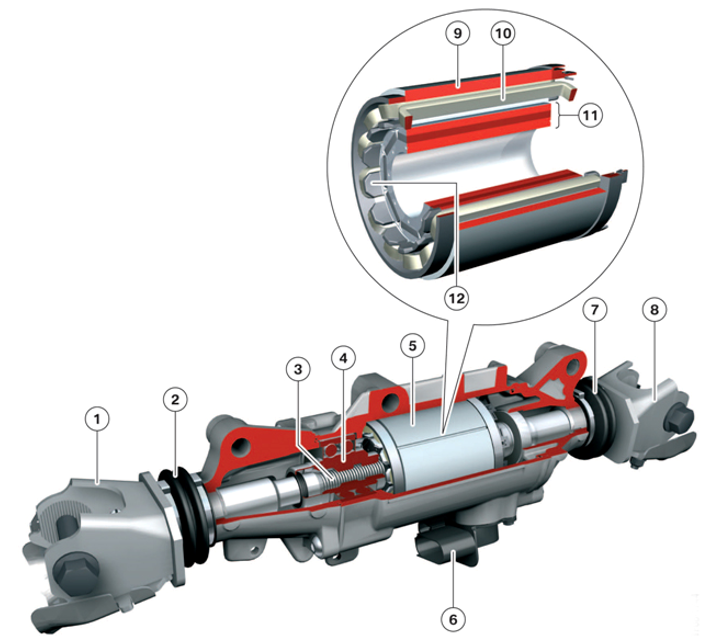
Рис. 14.42. Электромеханический исполнительный механизм поворота задней оси BMW:
1 – крепление левого рычага контроля схождения; 2 – левая противопыльная манжета; 3 – винтовой вал; 4 – гайка винтового вала; 5 –электродвигатель; 6 – электрический разъем; 7 – правая противопыльная манжета; 8 – крепление правого рычага контроля схождения; 9 – статор; 10 –обмотка статора; 11 – постоянный магнит; 12 – держатель (железный сердечник)
Винтовой вал подруливающего механизма самотормозящийся. При выходе механизма из строя автомобиль приобретает такие же динамические показатели, как у автомобиля без подруливающего механизма.
Подобная система применяется и для автомобилей Audi Q7 (рис. 14.43)
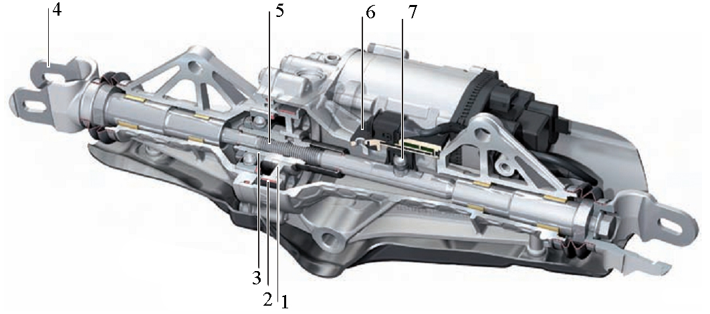
Рис. 14.43. Электромеханический исполнительный механизм поворота задней оси Audi Q7:
1 – шкив; 2 – приводной ремень; 3 – гайка ходового винта; 4 – крепление для направляющей тяги; 5 – ходовой винт; 6 – датчик нулевого положения рулевого механизма; 7 – магнитный палец
Электродвигатель приводит во вращение гайку ходового винта через ремённую передачу. Вращение гайки преобразуется в прямолинейное движение ходового винта. Закреплённые на нём направляющие тяги передают это движение на корпуса ступичных подшипников, приводя к одновременному повороту колёс в одну и ту же сторону: вправо или влево (в зависимости от направления вращения электродвигателя). Благодаря шагу и трапециевидному типу резьбы гайки/ходового винта, механизм является самостопорящимся. Напряжение на электродвигатель подаётся только непосредственно во время поворота колёс, в остальное время электродвигатель не приводится в действие. Удерживающие усилия возникают исключительно за счёт самостопорящихся свойств винтовой передачи.
Максимальный ход винта (из среднего положения) составляет прим. 9 мм, что соответствует максимальному углу поворота колёс прим. 5°.