Чтобы сохранить стабилизированное движение автомобиля применяется система курсовой устойчивости (название ESP – Electronic Stability Programme на большинстве автомобилей в Европе и Америке), которая предназначена для сохранения устойчивости и управляемости автомобиля за счет заблаговременного определения и устранения критической ситуации.
Система позволяет удерживать автомобиль в пределах заданной водителем траектории при различных режимах движения (разгоне, торможении, движении по прямой, в поворотах и при свободном качении).
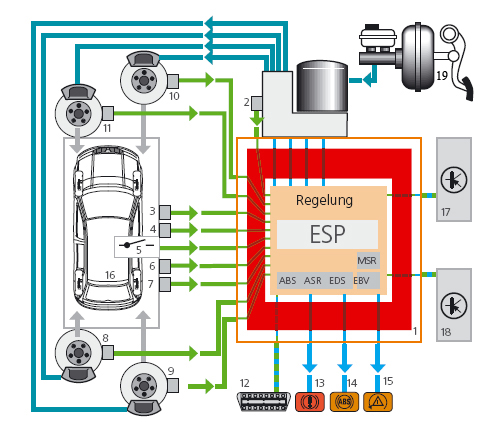
Конструктивные узлы ESP (рис. 16.2) включает основные узлы ABS. Устройство и принцип действия ABS рассмотрены выше.
Принципиальное отличие ESP от ABS в том, что она непрерывно следит за соответствием ускорений автомобиля по желанию водителя, выраженному в повороте рулевого колеса, в то время как ABS включается только при торможении.
Алгоритм работы системы зависит от режима движения ТС и заключается в следующем.
Система курсовой устойчивости должна распознавать начало заноса ТС и активно предотвращать это явление. Она определяет желаемое направление по углу поворота рулевого колеса, а датчики на всех колесах измеряют скорость их вращения. На основании этих данных блок управления вычисляет фактическую траекторию движения, которая более 25 раз в секунду сравнивается с желаемым направлением. Управление автомобилем с системой ESP учитывает три степени свободы автомобиля на плоскости дороги (продольная и поперечная составляющие движения, и поворот относительно вертикальной оси).
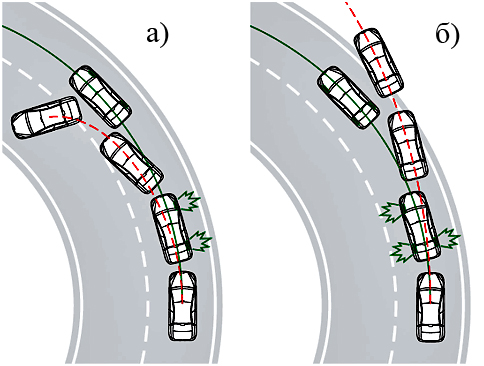
ESP выбирает тормозные усилия для каждого колеса отдельно таким образом, чтобы результирующая тормозных сил противодействовала моменту, стремящемуся развернуть автомобиль вокруг вертикальной оси, и удерживала его на оптимальной траектории. Если автомобиль плохо входит в поворот и скользит передними колесами наружу (недостаточная поворачиваемость) (рис. 16.3, б), ESP притормаживает внутреннее заднее колесо. В случае, когда автомобиль в результате заноса задней части резко поворачивает, чем необходимо (избыточная поворачиваемость) (рис. 16.3, а), ESP исправляет ошибку притормаживанием наружного переднего колеса.
Чтобы предотвратить занос заднеприводного автомобиля, ESP уменьшает частоту вращения коленчатого вала двигателя. Благодаря этому возникает стабилизирующий момент сил, возвращающий автомобиль на безопасную траекторию движения.
При угрозе опрокидывания автомобиль стабилизируется за счет уменьшения поперечного ускорения, которое достигается достаточно сильным притормаживанием передних колес и одновременным снижением
Блок управления ESP взаимодействует так же с системой управления двигателем и автоматической коробки передач (через соответствующие БУ). Помимо приема сигналов от этих систем БУ формирует управляющие воздействия на элементы системы управления двигателем и АКПП.
Если блок управления ESP вычисляет, что ускорение при разгоне автомобиля достигло критических значений и создаются условия для потери устойчивости ТС, выраженной в изменении его траектории движения (заносе) и боковом скольжении колес передней и/или задних осей, система в первую очередь включает подтормаживание тех колес, которые пробуксовывают.
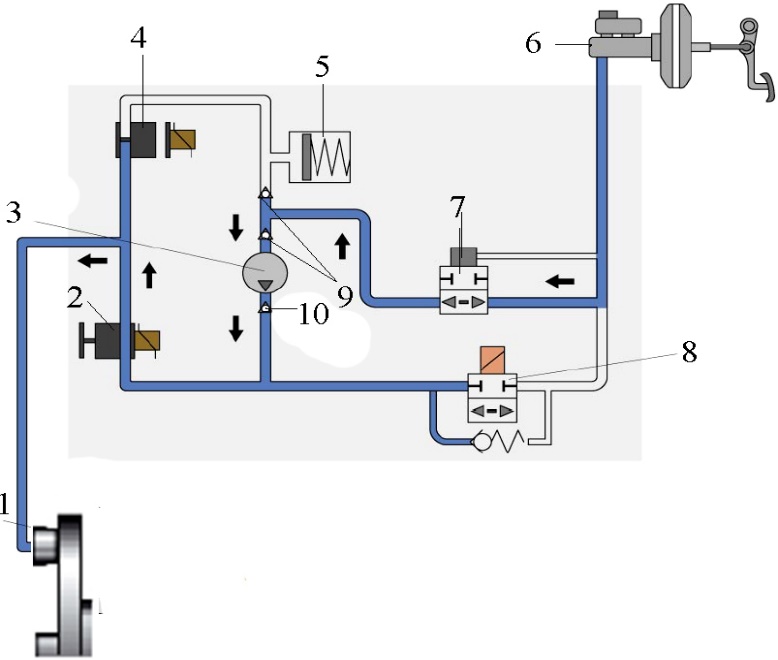
В этом случае гидравлический насос 3 ABS (рис. 16.4) через открытый впускной клапан 2 подает жидкость в тормозной контур и давление быстро нарастает, при этом колодка тормозного механизма колесного тормоза 1 прижимается к диску и происходит подтормаживание. В случае необходимости поддержания давления в тормозном контуре впускной клапан 2 закрывается, а выпускной клапан 4 остается закрытым. Давление в рабочем тормозном цилиндре остается неизменным. Возвратный насос ABS останавливается и клапан высокого давления 10 закрывается. Закрытый обратный клапан 8 предотвращает перетекание тормозной жидкости в тормозном трубопроводе обратно в главный тормозной цилиндр.
Если ЭБУ на основе сигналов от датчиков скорости колеса определяет, что ведущие колеса при ускорении больше не пробуксовывают, возникает необходимость снижения давления в системе для растормаживания, распределительный клапан 7 при этом открывается, изменяя направление течения жидкости на противоположное. Впускной клапан 2 остается закрытым, выпускной клапан 4 открыт. Тормозная жидкость свободно течет обратно через главный тормозной цилиндр в бачок.
Задачей ограничителя давления является ограничение давления, создаваемого гидравлическим насосом. Если блок управления ABS/EDL обнаруживает снижение ускорения колеса на основании сигналов от датчика скорости колеса, то прежде всего отключается гидравлический насос, чтобы избежать дальнейшего увеличения давления в тормозной системе.
Датчики фиксируют конкретные параметры автомобиля и в первую очередь изменение его траектории под действием боковых внешних сил. С помощью датчиков система динамической стабилизации оценивает действия водителя и другие параметры движения автомобиля. Блок управления системы ESP принимает сигналы от датчиков и формирует управляющие воздействия на исполнительные устройства подконтрольных систем активной безопасности. При необходимости блок использует информацию из блока управления системы управления двигателем и блока управления автоматической коробки передач.
Одновременно датчики угловой скорости измеряют перемещение транспортного средства вокруг вертикальной оси и его боковое ускорение. Если значения расходятся, система немедленно реагирует на ситуацию без какого-либо вмешательства со стороны водителя, снижая мощность двигателя и восстанавливая стабильность автомобиля. Если этого недостаточно, ESP дополнительно подтормаживает каждое колесо. Возникающее вращательное движение колеса противодействует заносу и автомобиль остается на безопасной траектории движения.
Оцениваются также сигналы от датчика угла поворота 6 рулевого колеса, датчика давления 2 в тормозной системе и от ЭБУ управления работой двигателя 17 (рис. 16.2). Помимо скорости движения автомобиля в определении алгоритма управления также входят необходимые характеристики коэффициентов сцепления между шинами и дорожным покрытием. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колёс 8-11, датчика бокового ускорения 3, датчика рыскания 4 и датчика давления в тормозной системе 2. Датчик бокового ускорения сообщает блоку управления о боковом сносе автомобиля, в то время как датчик рысканья сигнализирует о склонности к заносу. Затем вычисляется момент относительно вертикальной оси, который необходим для приближённого приведения параметров действительного состояния к параметрам требуемого состояния.
Гидравлический блок с блоком управления этой системы аналогичен описанному выше гидравлическому блоку ABS, но включает дополнительно возвратный насос.
Антипробуксовочная система является составной частью ESP. При движении автомобиля довольно часто встречается ситуация, когда сцепные условия различных колёс оказываются разными. Например, выбоины дорожного полотна могут быть заполнены щебнем или разные части дорожного полотна могут находиться в разной степени износа. При торможении на участках дорожного полотна с различными сцепными свойствами могут возникать разворачивающие моменты, стремящиеся повернуть автомобиль относительно вертикальной оси. Программное расширение системы ABS даёт возможность отреагировать на возникновение разворачивающего момента за счёт того, что установление различного давления в правых и левых тормозных механизмах будет происходить по-разному. При этом говорят о воздействии на возникновение разворачивающего момента. Разница давлений в тормозных механизмах увеличивается медленнее, давая водителю больше времени, чтобы отреагировать.
Колёса, находящиеся со стороны с хорошим сцеплением, тормозятся сильнее чем те, которые находятся со стороны более скользкого покрытия. Возникающий при этом момент сил (вокруг вертикальной оси), приводит к разворачиванию автомобиля, отреагировать на которое поворотом рулевого колеса водитель не может.
Антипробуксовочная система ASR предназначена для предотвращения пробуксовки ведущих колёс.
Антипробуксовочная система построена на конструктивной основе антиблокировочной системы тормозов. В системе ASR реализованы две функции: электронная блокировка дифференциала и управление крутящим моментом двигателя.
Для реализации противобуксовочных функций в системе используется насос обратной подачи и электромагнитные клапаны (впускной, выпускной и клапан высокого давления) на каждое из ведущих колес в гидравлическом блоке ABS.
Управление системой ASR осуществляется за счет соответствующего программного обеспечения, включенного в блок управления ABS. В своей работе блок управления ABS/ASR взаимодействует с блоком управления системы управления двигателем.
Система ASR предупреждает пробуксовку колес во всём диапазоне скоростей автомобиля:
при низких скоростях движения (от 0 до 80 км/ч) система обеспечивает передачу крутящего момента за счёт подтормаживания ведущих колёс;
при скорости выше 80 км/ч усилия регулируются за счёт уменьшения передаваемого от двигателя крутящего момента.
Если дорожное покрытие под одной стороной автомобиля скользкое, вследствие чего при скорости до 80 км/ч возникает различие в частоте вращения ведущих колес примерно в 100 об/мин, тогда путем притормаживания пробуксовывающего колеса частота вращения колес выравнивается, а на другое колесо посредством действия дифференциала передается повышенное тяговое усилие.
Для того чтобы тормозной механизм приторможенного колеса слишком сильно не нагревался, блокировка дифференциала при больших нагрузках автоматически отключается. Как только тормозной механизм охладится, противобуксовочная система колеса автоматически включается вновь.
Принцип действия системы. В исходном положении ЭБУ управления системой не подает управляющих сигналов на исполнительные механизмы и подтормаживания колес не происходит (рис. 16.5, а).
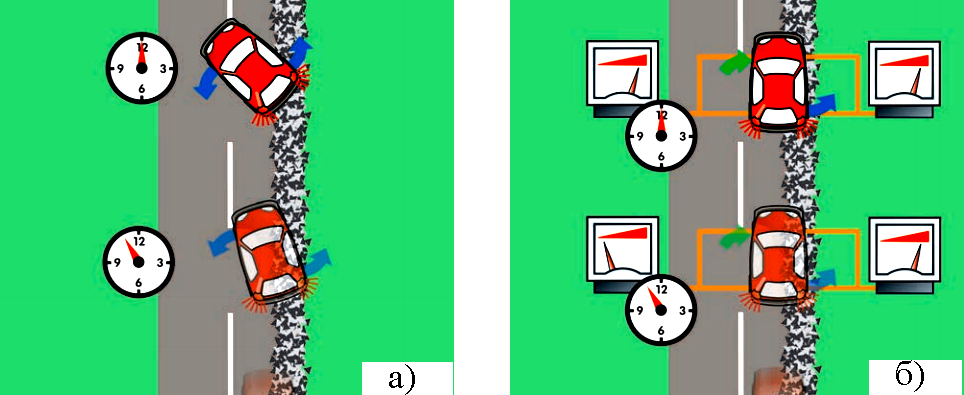
Если блок управления ABS, устанавливает, что при выполнении торможения угловая скорость левых колёс отличается от угловой скорости правых, система делает вывод, что возможно развитие нежелательного разворачивающего момента. В этом случае увеличение тормозного усилия с той стороны, где колёса вращаются с большей угловой скоростью, несколько замедляется, так чтобы угловые скорости колёс с левой и правой стороны снова уравнялись. В этом случае возвратный насос ABS через открытый впускной клапан подает жидкость в тормозной контур и давление быстро нарастает, при этом колодка тормозного механизма прижимается к диску и происходит подтормаживание колеса.
На основании сигналов датчиков частоты вращения колес блок управления ABS/ASR определяет следующие характеристики:
угловое ускорение ведущих колёс;
скорость движения автомобиля (на основании угловой скорости не ведущих колёс);
характер движения автомобиля — прямолинейное или криволинейное (на основании сравнения угловых скоростей не ведущих колёс);
величину проскальзывания ведущих колёс (на основании разницы угловых скоростей ведущих и не ведущих колёс).
В зависимости от текущего значения эксплуатационных характеристик производится управление тормозным давлением или управление крутящим моментом двигателя.
Управление крутящим моментом двигателя осуществляется во взаимодействии с системой управления двигателем. На основании информации о проскальзывании ведущих колес, получаемой от датчиков угловой скорости колес, и фактической величине крутящего момента, получаемой от блока управления двигателем, блок управления противобуксовочной системы вычисляет величину необходимого крутящего момента. Данная информация передается в блок управления системы управления двигателем и реализуется с помощью различных действий:
изменения положения дроссельной заслонки;
пропуска впрыскиваний топлива в системе впрыска;
отмены переключения передачи в автомобилях с автоматической коробкой передач.
При срабатывании противобуксовочной системы загорается контрольная лампа на панели приборов. Система имеет возможность отключения.
Датчики системы курсовой устойчивости автомобиля. Кроме датчиков, применяемых в системе ABS в интегрированной системе управления динамикой автомобиля, т.е. системе, объединяющей систему курсовой устойчивости, рулевое управление и подвеску применяют датчик угла поворота рулевого колеса, датчик бокового ускорения, датчик рысканья (угловой скорости).
Датчик угла поворота рулевого колеса (рис. 16.6) является одним из датчиков положения, которые широко используются в электронных системах автомобиля.
В отличие от других датчиков датчик угла поворота рулевого колеса определяет угловое перемещение в широком диапазоне (свыше 720° в каждую сторону или четыре полных оборота рулевого колеса). Датчик устанавливается на рулевой колонке между переключателем и рулевым колесом, реже – на рулевом механизме. При включении зажигания датчик активизируется при первом повороте рулевого колеса на 4,5°, что соответствует перемещению по окружности рулевого колеса на 1,5 см.
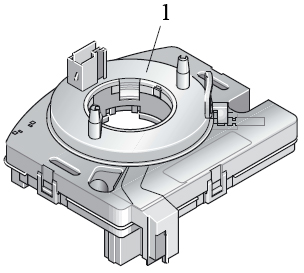
Датчик угла поворота рулевого колеса служит для определения угла поворота (относительный угол), направления поворота (абсолютный угол) и угловой скорости рулевого колеса. Перечень функций определяется потребностями конкретной системы автомобиля. Таким образом, с помощью датчика угла поворота рулевого колеса определяется направление движения, которое задает водитель.
Датчик угла поворота рулевого колеса используется в работе нескольких автомобильных систем: курсовой устойчивости, адаптивного круиз-контроля, помощи движению по полосе, электрогидравлического усилителя рулевого управления, электромеханического усилителя рулевого управления, активного рулевого управления, адаптивного освещения, активной подвески.
В качестве датчика угла поворота рулевого колеса используется несколько типов датчиков, построенных на различных физических принципах измерений: потенциометрический, оптический и магниторезистивный.
Датчик бокового ускорения представляет собой элемент на печатной плате интегрированного датчика. Упрощено можно представить конструкцию датчика как подвешенную в центре подвижную массу 4 с прикрепленной к ней пружинными пластинками 5 (рис. 16.7).
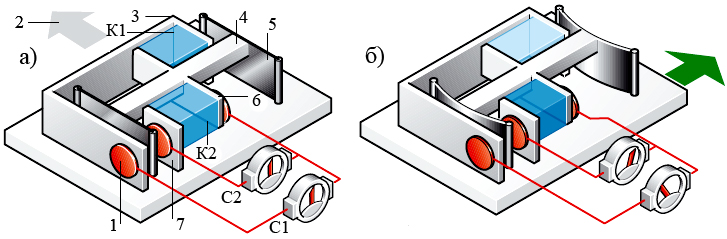
Масса способна перемещаться в одном направлении, в обе стороны. Две другие неподвижные пластинки конденсатора 3 и 7 окружают пластинки, соединенные с подвижной массой. Таким образом получается два последовательно соединенных конденсатора К1 и К2. Их емкости C можно измерить и сравнить на электродах.
При отсутствии ускорения заряд конденсаторов одинаковый. Как только возникает поперечное ускорение, масса в силу инерции переместится относительно неподвижных пластинок в противоположном от ускорения направлении. Изменение расстояния между пластинками конденсаторов приводит к изменению их емкостей. В данном примере расстояние между пластинками конденсатора К1 больше, чем между пластинками конденсатора К2, поэтому емкость С1 меньше. Емкость С2 больше, так как расстояние между пластинками конденсатора К2 меньше.
Датчик рысканья (угловой скорости) располагается в дополнении к датчику бокового ускорения на печатной плате (рис. 16.8).
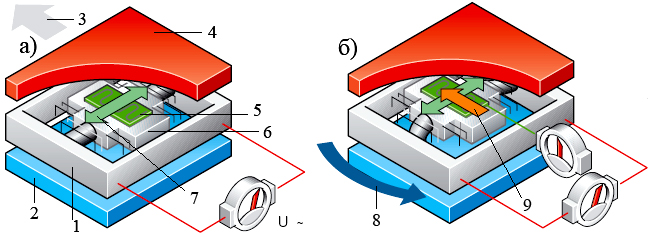
Принцип работы датчика заключается в следующем. Колеблющаяся масса 6 подвешена в поле постоянного магнита между южным 2 и северным 4 полюсами. Печатные проводники 5 объединены с колеблющейся массой, которая фактически и является датчиком. Если приложить переменное напряжение U, то подвижная масса с печатными проводниками начнет колебаться в магнитном поле. При возникновении углового ускорения появиться отклонение от прямолинейного колебательного движения, так как возникнет ускорение от известной в механике кориолисовой силы.