К вспомогательным системам относят:
— системы помощи при экстренном торможении;
— система распределения тормозных усилий;
— система замедления задних колёс;
— система предотвращения непреднамеренного ускорения;
— система подсушивания тормозов;
— система компенсации падения эффективности тормозов при их нагреве;
— система помощи при подъеме;
— система помощи при спуске;
— парковочная система;
— система кругового обзора;
— система распознавания дорожных знаков;
— системы обнаружения движущихся объектов на проезжей части дороги;
— круиз-контроль;
— система контроля усталости водителя;
— датчик дождя и освещенности;
— темнеющие зеркала заднего вида;
— проекционный дисплей;
— системы помощи при ДТП;
— система помощи движению по полосе;
— система помощи при перестроении;
— адаптивные системы освещения и др.
Система помощи при экстренном торможении предназначена для эффективного использования тормозов в экстренной ситуации.Конструкции систем помощи при экстренном торможении можно разделить на два типа по принципу создания максимального тормозного давления: пневматические и гидравлические.
Конструктивно данные системы объединяют датчик скорости перемещения штока вакуумного усилителя, электронный блок управления и электромагнитный привод штока.
Принцип работы системы пневматического типа основан на распознавании ситуации экстренного торможения по скорости нажатия педали тормоза. Скорость нажатия на педаль тормоза фиксирует датчик скорости перемещения штока вакуумного усилителя и передает сигнал в электронный блок управления. Если величина сигнала превышает установленное значение, электронный блок управления активирует электромагнит привода штока. Вакуумный усилитель тормозов дожимает педаль тормоза. Экстренное торможение происходит до срабатывания системы ABS. (Дополнитенльно система рассматривалась ранее в разделе 4.2.2).
Системы помощи при экстренном торможении гидравлического типа обеспечивают максимальное давление жидкости в тормозной системе за счет использования элементов системы курсовой устойчивости.
Система распознает экстренную ситуацию по скорости и силе нажатия педали тормоза. В работе системы используется датчик давления в тормозной системе, датчики частоты вращения колес, выключатель стоп-сигнала. На основании поступающих сигналов электронный блок управления при необходимости включает насос обратной подачи, который доводит давление в тормозной системе до максимального.
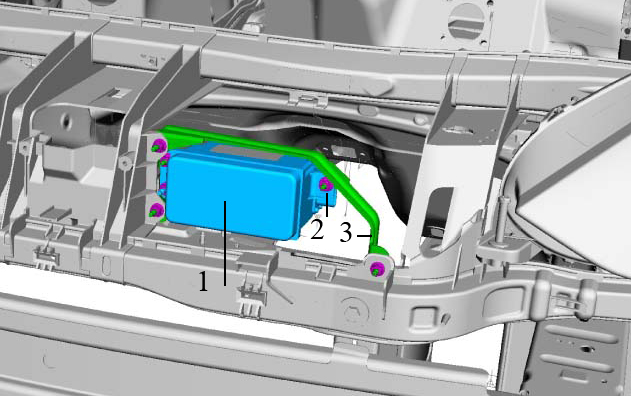
Для измерения дистанции в предусмотрен радиолокационный датчик (радар), работающий в диапазоне миллиметровых волн. Радар предупреждения о приближении к впереди идущему транспорту располагается за решеткой радиатора (рис. 16.10).
Радар работает с использованием радиоволн в высокочастотном диапазоне (выше 1 ГГц). Радиоволны испускаются вперед. Когда волны достигают впереди идущего автомобиля, они отражаются и снова принимаются радаром. Время между отправкой и получением дает радару данные для расчета расстояния и для определения относительной скорости.
Радар позволяет производить измерения расстояний сразу до нескольких объектов, находящихся в зоне его охвата, и определять относительную скорость объектов, через которые проходит продольная ось автомобиля. По данным измерений рассчитывается угол отклонения (азимут) объекта от оси зоны охвата датчика. В корпусе радара находится быстродействующее вычислительное устройство, которое позволяет расчетным путем определить: упреждающее положение полосы следования; объект слежения; данные регулирования дистанции и скорости автомобиля; данные для передачи на блоки управления двигателем, усилителем тормозного привода и комбинацией приборов; диагностические параметры.
Если расстояние мало и существует опасность столкновения производится визуальное и звуковое предупреждение водителя. Если водитель тормозит недостаточно эффективно система дотормаживает за него.
Основными параметрами автомобильного радара являются: дальность обнаружения, диапазон определяемой скорости, угол обзора, разрешение. В зависимости от значений указанных характеристик автомобильные радары подразделяются на устройства ближнего, среднего и дальнего действия.
В системах экстренного торможения и других системах активной безопасности, среди которых системы автоматического экстренного торможения, помощи движению по полосе, помощи при перестроении, ночного видения, распознавания дорожных знаков, аварийного рулевого управления, обнаружения пешеходов, кругового обзора, оптическая парковочная система, могут применяться видеокамеры.
Помимо данных систем видеокамера применяется в системе управления дальним светом, ряде противоугонных систем, видеорегистраторах. Видеокамера является важным конструктивным элементом в разрабатываемых системах автоматического управления автомобилем. Одна видеокамера может использоваться в работе нескольких систем.
В зависимости от системы сигнал от видеокамеры служит для создания изображения или его дальнейшей обработки. Полученное изображение призвано предоставить водителю достоверную информацию и, тем самым, оказать помощь в сложных ситуациях. В более сложных системах электронный блок управления производит обработку изображения с помощью специального программного обеспечения. В результате вырабатываются предупреждающие сигналы водителю и (или) управляющие воздействия на исполнительные механизмы систем (тормозная система, рулевое управление, дроссельная заслонка).
Видеокамеры устанавливаются со всех сторон автомобиля. Количество и места установки определяются конкретной системой. Самое распространенное место видеокамеры спереди, как правило, за салонным зеркалом заднего вида или за решеткой радиатора. Сбоку видеокамера устанавливается в корпусе наружного зеркала заднего вида. Сзади камеру можно увидеть в блоке фонарей освещения номерного знака. В ряде моделей Volkswagen задняя видеокамера спрятана за эмблемой производителя, что позволяет защитить ее от грязи.
Система автоматического экстренного торможения с помощью радара (лидара) и видеокамеры обнаруживает впереди идущий автомобиль. В случае вероятной аварии (интенсивного сокращения растояния между автомобилями) система реализует частичное или максимальное тормозное усилие, замедляет или останавливает автомобиль. Даже если столкновение произошло, последствия его для обоих автомобилей будут значительно меньше.
Система сканирования пространства перед автомобилем Front Assist. Front Assist представляет собой систему поддержки водителя с предупредительной функцией, служащую для предотвращения наезда на следующий впереди автомобиль. Системы сокращения остановочного пути AWV1 и AWV2 (от немецкого Anhaltewegverkürzung — сокращение остановочного пути) являются составными частями системы Front Assist. При опасном сокращении дистанции до следующего впереди автомобиля система Front Assist реагирует в два этапа — так называемые предварительное и главное предупреждение (рис. 16.11).
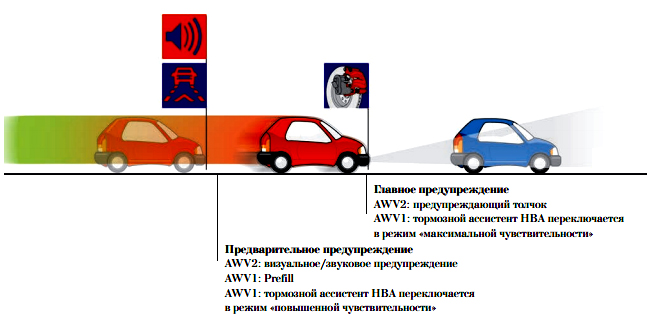
Предварительное предупреждение. При предварительном предупреждении сначала в комбинации приборов отображается предупреждающий символ (дополнительно может раздаваться акустический сигнал). Одновременно с этим в тормозной системе предварительно повышается давление (Prefill), а гидравлический тормозной ассистент (HBA) переключается в режим «повышенной чувствительности».
Главное предупреждение. Если водитель не реагирует, то система предупреждает его коротким толчком. Одновременно тормозной ассистент переключается в режим «максимальной чувствительности».
Функция сокращения остановочного пути AWV1 Prefill (создание в тормозной системе «давления готовности») Для того чтобы подготовить тормозную систему к быстрому началу (ожидаемого от водителя) экстренного торможения, в тормозных контурах всех четырёх колёс предварительно создаётся «давление готовности». Эта операция называется также Prefill (от английского prefill — предварительное наполнение) и приводит к выбиранию зазоров между тормозным диском и накладками тормозных колодок. Незаметно для водителя тормозные накладки подводятся вплотную и слегка прижимаются к тормозным дискам. Когда блок управления адаптивного круиз-контроля передаёт сигнал об опасно быстром сокращении дистанции до идущего впереди автомобиля, функция Prefill создаёт в тормозной системе небольшое давление. Это давление составляет примерно 0,2 МПа и удерживается в течение максимум 5 секунд. Если теперь водитель действительно нажмёт на педаль тормоза, система сможет отреагировать сразу же, без задержки и с максимальным усилием. Если нажатия педали тормоза не последует, давление в системе вновь снижается. Для того чтобы водитель мог перенести ногу с педали акселератора на педаль тормоза, требуется определённое время, точно так же определённое время требуется и для срабатывания гидравлической системы (создания в ней необходимого давления). В экстренных ситуациях, однако, малейшая доля секунды может играть решающую роль. Функция сокращения остановочного пути AWV1 заранее подготавливает системы автомобиля к (ожидаемому от водителя) экстренному торможению. Для этого:
● в гидравлической системе тормозов создаётся предварительное «давление готовности» (т. н. Prefill);
● изменяется чувствительность гидравлического тормозного ассистента (HBA).
Переключение чувствительности HBA. Для того чтобы в экстренной ситуации можно было как можно быстрее добиться максимальной интенсивности торможения, чувствительность тормозного ассистента повышается, причём это происходит в два этапа. Тормозной ассистент распознаёт намерение водителя выполнить экстренное торможение, анализируя характер нажатия педали тормоза. В ситуации опасного сокращения дистанции порог срабатывания тормозного ассистента понижается, что позволяет уменьшить остановочный путь автомобиля. Переключение в режим «повышенной чувствительности» осуществляется одновременно с подачей визуального/звукового предупреждения. Переключение в режим «максимальной чувствительности» происходит одновременно с создваемым тормозной системой предупредительным толчком. Режим повышенной чувствительности остаётся включённым не более 5 секунд.
Функция сокращения остановочного пути AWV2. Функция сокращения остановочного пути AWV2 непосредственно предупреждает водителя о грозящей опасности наезда на следующий впереди автомобиль. Блок управления динамического круиз-контроля постоянно следит за скоростью следующего впереди автомобиля и расстоянием до него. При опасном сближении и отсутствии в течение определённого времени реакции водителя на изменившуюся ситуацию система предупреждает его в два этапа:
● визуальное/звуковое предупреждение;
● короткий толчок (создаваемый с помощью тормозной системы).
В качестве первого (предварительного) предупреждения одновременно подаются визуальный и звуковой сигналы. Визуальный сигнал заключается в отображении в комбинации приборов предупреждающего символа. В качестве звукового сигнала раздаётся зуммер (дополнительно). Если водитель не реагирует и не устраняет сокращение дистанции, следует второе предупреждение. Система кратковременно создаёт определённое давление в контурах тормозов. Блок управления ABS/ESP по шине CAN получает от блока управления адаптивного круиз-контроля запрос на задействование тормозов и выполняет его с помощью либо активного усилителя тормозов, либо насоса обратной подачи в гидравлическом блоке. Тормоза включаются на очень короткое время. Такой «тормозной толчок» обращает внимание водителя на опасность столкновения. Сам по себе, однако, такой толчок практически не уменьшает скорость автомобиля.
Функция сокращения остановочного пути не включается при скоростях меньше 30 км/ч.
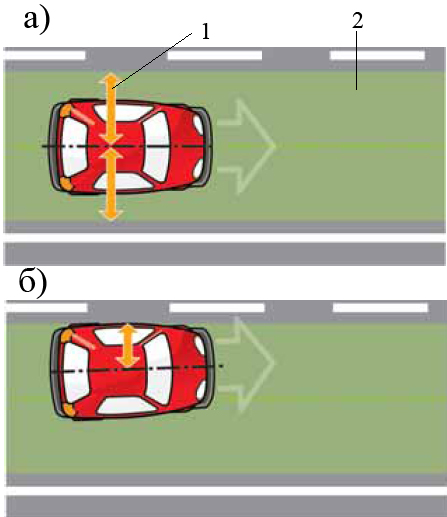
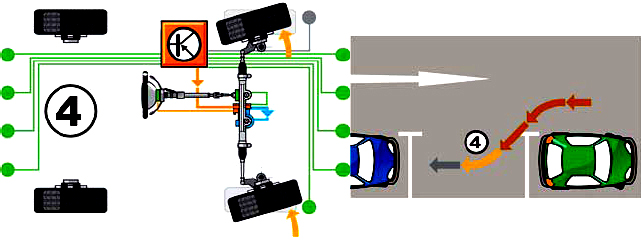
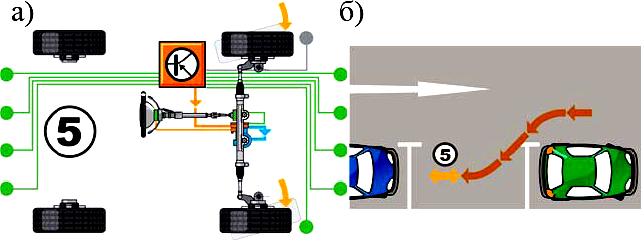
Система распределения тормозных усилий. Современный легковой автомобиль устроен так, что на заднюю ось приходится меньшая нагрузка, чем на переднюю (рис. 16.12, а). Для сохранения устойчивости автомобиля тормозные усилия должны распределяться таким образом, чтобы колёса передней оси блокировались раньше колёс задней оси, для обеспечения сохранения определённой минимальной курсовой устойчивости.
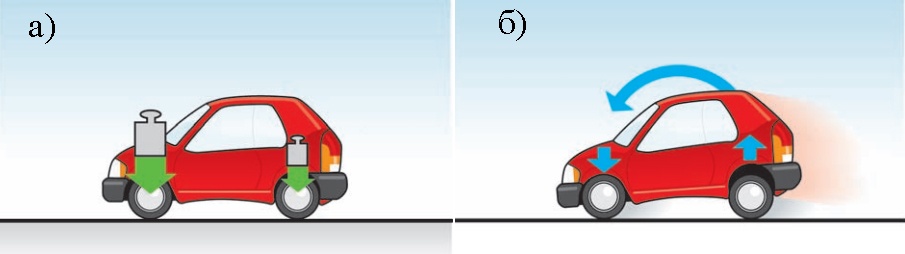
При резком торможении происходит дополнительное перераспределение нагрузки на переднюю ось (рис. 16.12, б). Автомобиль накреняется относительно поперечной оси («клюёт»). В результате этого движения нагрузка, приходящаяся на заднюю ось, уменьшается. В результате уменьшения нагрузки уменьшается и максимальная сила сцепления с дорожным покрытием, и задние колёса могут оказаться заблокированными. Автомобиль с заблокированными задними колёсами неустойчив и может в любой момент сорваться в неконтролируемый занос. Для предотвращения такого критического состояния используется функция перераспределения тормозных усилий. Система распределения тормозных усилий предназначена для предотвращения блокировки задних колес за счет управления тормозным усилием задней оси.
Система распределения тормозных усилий представляет собой программное расширение антиблокировочной системы тормозов. Другими словами, система использует конструктивные элементы системы ABS.
Принцип работы. Система сравнивает угловые скорости передних и задних колёс. Когда разница между ними превышает определённую величину значений, система распознаёт превышение тормозного усилия. Блок управления ESP/ABS регистрирует, на основании входящих сигналов, что на передней оси происходит срабатывание ABS и что водитель нажал педаль тормоза достаточно быстро и сильно. Тогда система самостоятельно повышает тормозное давление задних колёс до начала срабатывания на них ABS. По данным датчиков частоты вращения колес блок управления ABS сравнивает тормозные усилия передних и задних колёс. Когда разница между ними превышает заданную величину, включается алгоритм системы распределения тормозных усилий
Для увеличения давления используется насос обратной подачи, оба впускных клапана задних колёс остаются открытыми до тех пор, пока по данным датчиков угловой скорости задних колёс не будет установлено, что задние колёса близки к блокированию. Тогда управление перенимает сама система ABS, регулирующая давление по трём фазам: «удержание давления», «сброс давления» и «увеличение давления», для полного использования тормозного потенциала задних колёс с одновременным сохранение курсовой устойчивости автомобиля.
Система замедления задних колёс. Упрощённо систему замедления задних колёс можно представить себе, как функцию, противоположную электронному распределению тормозных усилий. Если последняя преследует цель не допустить избыточного торможения задних колёс, то система замедления задних колес обеспечивает такое увеличение тормозного давления в тормозном контуре задней оси, при котором на задних колёсах происходит срабатывание ABS.
При торможении сильно нагруженного автомобиля, вследствие его высокой массы и соответственно инертности, необходимы большие тормозные усилия. Цель системы состоит в том, чтобы обеспечить оптимальное использование всего потенциала сцепления колёс с дорогой для полностью нагруженного автомобиля.
Оптимальное торможение достигается в режиме работы ABS. Когда водитель нажимает педаль тормоза, в режим работы ABS сначала выводятся передние колёса, в то время как задние колёса всё ещё находятся вне зоны срабатывания ABS.
ABS, по самому принципу своей работы, срабатывает тогда, когда колёса склонны к блокированию. Вследствие полной загрузки автомобиля передние колёса позже начинают блокироваться, т. к. в реультате высокой нагрузки на заднюю ось увеличивается максимальная сила сцепления задних колёс с дорогой и они, тем самым, могут воспринимать большие тормозящие усилия, чем передние. Поэтому на полностью загруженном автомобиле задние колёса сами по себе не полностью реализуют свой максимальный тормозной потенциал.
Принцип работы. Блок управления ESP/ABS регистрирует, на основании входящих сигналов, что на передней оси происходит срабатывание ABS и что водитель нажал педаль тормоза достаточно быстро и сильно. Тогда система самостоятельно повышает тормозное давление задних колёс до начала срабатывания на них ABS (рис. 16.13).

Для увеличения давления используется насос обратной подачи, оба впускных клапана задних колёс остаются открытыми до тех пор, пока по данным датчиков угловой скорости задних колёс не будет установлено, что задние колёса близких блокированию. После этого управление перенимает сама система ABS, регулирующая давление по трём фазам: «удержание давления», «сброс давления» и «увеличение давления», для полного использования тормозного потенциала задних колёс с одновременным сохранение курсовой устойчивости автомобиля.
Система предотвращения непреднамеренного ускорения применяется для автомобилей с автоматической коробкой передач, у которых могут происходить случаи непреднамеренного ускорения, вызванные ошибками в действиях водителя: неправильным выбором педали, чрезмерным нажатием педали газа, переключением селектора коробки передач при нажатой педали газа.
Автомобиль неожиданно ускоряется, что приводит к различным авариям – столкновениям с другими автомобилями, сооружениями, пешеходами. Для снижения аварийности при парковке разрабатываются различные системы предотвращения непреднамеренного ускорения. Такая система базируется на нескольких ультразвуковых датчиках, которые сканируют пространство впереди и сзади автомобиля. При ускорении автомобиля, связанном с неправильным использованием педалей и чрезмерным нажатием педали газа, датчики определяют положение препятствий и расстояние до них. Сигналы от датчиков обрабатывает электронный блок управления, который взаимодействует с другими системами автомобиля – системой управления двигателем и системой курсовой устойчивости. С их помощью при необходимости снижается мощность двигателя (торможение двигателем) и активизируется тормозная система.
Система подсушивания тормозов BSW (сокращение от прежнего нем. названия Bremsscheibenwischer) раньше также иногда называлась Rain Brake Support (RBS).
В дождливую погоду на тормозных дисках может образовываться тонкая водяная плёнка. Это приводит к некоторому замедлению возникновения тормозного момента, так как тормозные накладки сначала скользят на этой плёнке до тех пор, пока вода в результате нагрева деталей тормоза не испарится или не будет «стёрта» накладками с поверхности диска. Только после этого тормозной механизм развивает свой полный тормозной момент. При торможении в критической ситуации каждая доля секунды задержки имеет огромное значение. Поэтому для предотвращения такой задержки в срабатывании тормозов в сырую погоду была разработана система подсушивания тормозов. Система подсушивания тормозов BSW следит за тем, чтобы диски тормозов передних колёс всегда были сухими и чистыми. Достигается это лёгким и кратковременным прижатием тормозных колодок к дискам. Тем самым полный тормозной момент достигается в случае необходимости без задержки и сокращается тормозной путь.
Обязательным условием для реализации на автомобиле системы подсушивания тормозов BSW является наличие на нём системы ESP. Условия включения системы подсушивания тормозов BSW: автомобиль движется со скоростью не менее 70 км/ч и стеклоочиститель включён. Если эти условия выполнены, то во время работы стеклоочистителя в постоянном или интервальном режиме колодки передних тормозов через определённые промежутки времени подводятся к тормозным дискам. Тормозное давление при этом не превышает 0,2 МПа. При однократном включении стеклоочистителя колодки подводятся к дискам также один раз. Такие лёгкие прижатия накладок, как они осуществляются системой BSW, для водителя незаметны.
Принцип работы. Блок управления ABS/ESP получает по шине данных CAN сообщение, что сигнал скорости соответствует более 70км/ч. Далее системе требуется сигнал работы электродвигателя стеклоочистителя. По нему система BSW делает вывод, что идёт дождь и на дисках тормозов возможно образование водяной плёнки, приводящей к замедлению срабатывания тормозов. После этого система BSW включает тормозной цикл. На клапаны наполнения передних тормозных цилиндров подаётся управляющий сигнал. Насос обратной подачи включается и создаёт давление около 2МПа и удерживает его в течение нескольких оборотов колеса (рис. 16.14).

В течение всего этого цикла система постоянно контролирует тормозное давление. Если тормозное давление превышает определённое заложенное в памяти системы значение, она сразу же снижает давление, чтобы не допустить никакого заметного тормозного воздействия. При нажатии водителем педали тормоза цикл прерывается и после завершения нажатия начинается сначала.
Система компенсации падения эффективности тормозов при их нагреве. Эта система называется в технической литературе Overboost и также FBS (от англ. Fading Brake Support).
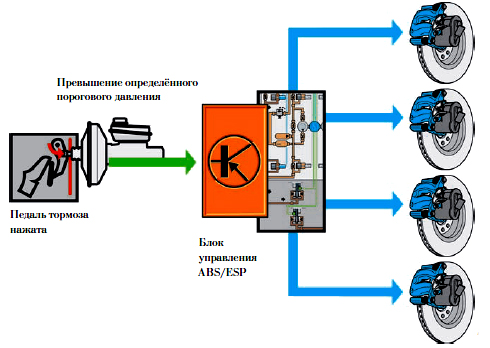
На дороге с нормальным коэффициентом сцепления колес с дорогой водитель, как правило, в критической ситуации водитель нажимает педаль тормоза с усилием, превышающем определённое пороговое значение. Учитывая благоприятные дорожные условия, срабатывания системы ABS не происходит. При этом, в результате трения тормозных колодок о диск, происходит сильное нагревание тормозных механизмов колес и эффективность торможения падает. Если водитель продолжает сильно нажимать на тормозную педаль включается функция Overboost. Система увеличивает тормозное давление до тех пор, пока не наступит срабатывание ABS на всех 4 колёсах. Схема действия системы компенсации падения эффективности тормозов при их нагреве показана на рис. 16.15.
Максимальное развиваемое давление ограничивается пределом прочности деталей системы (например, недопущением деформации суппортов).
Overboost также является только программным расширением системы ESP.
Отличие Overboost от гидравлического тормозного ассистента заключается в том, что функция Overboost предназначена не для компенсирования ошибок неопытного водителя, а для более эффективного действия тормозной системы.
Система помощи при подъеме. Система помощи при подъеме предназначена для предотвращения откатывания автомобиля при трогании на подъеме (наклонной плоскости). Применение данной системы облегчает трогание автомобиля на подъеме, исключая использование механического стояночного тормоза, и повышает безопасность. Система устанавливается в качестве опции на некоторые легковые автомобили.
В зависимости от автопроизводителя система имеет следующее название:
HHC, Hill Hold Control от Volkswagen;
Hill Holder от Subaru, Fiat;
HAC, Hill-Start Assist Control от Toyota;
USS, Uphill Start Support от Nissan.
Система помощи при подъеме построена на базе системы динамической стабилизации и является программным расширением данной системы, поэтому системой, как таковой, не является.
При остановке автомобиля на подъёме на автомобиль действует скатывающая сила FH противоположная силе на спуске, т. е. сила, под воздействием которой автомобиль начнёт скатываться назад, если отпустить тормоз. При трогании автомобиля после остановки на подъёме его тяговое усилие сначала должно уравновесить скатывающую силу.
Если водитель нажмёт педаль акселератора слишком слабо или же отпустит педаль тормоза (или стояночный тормоз) слишком рано, сила тяги окажется меньше скатывающей силы и автомобиль, прежде чем тронуться, начнёт скатываться назад. Чтобы обеспечить комфортное и безопасное трогание автомобиля, находящегося на подъеме, в некоторых конструкциях автомобилей предусмотрена система помощи при подъёме, который облегчает трогание на подъёме, позволяя выполнить его, не прибегая к помощи стояночного тормоза. Для этого система при трогании замедляет уменьшение тормозного давления в гидравлической систем, предотвращая скатывание автомобиля назад, пока сила тяги ещё недостаточна для компенсации скатывающей силы.
Система задействуется при выполнении следующих условий: автомобиль неподвижен; подъем превышает 5 %; двигатель работает; дверь водителя закрыта.
Комплектация системы трогания на подъёме базируется на системе ESP. Блок датчиков ESP дополняется датчиком продольного ускорения, распознающим положение автомобиля.
Работу системы можно подразделить на 4 фазы (рис. 16.16 и рис. 16.17).
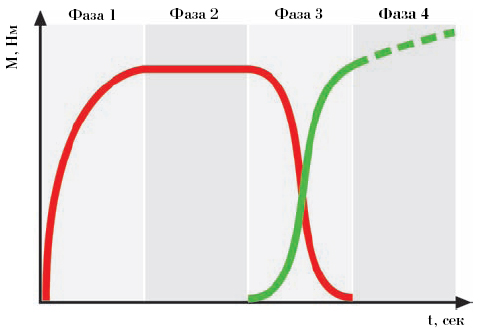
Фаза 1 — создание тормозного давления. Водитель останавливает или удерживает автомобиль нажатием педали тормоза. Клапан высокого давления закрыт. (см. рис. Принципиальная схема работы контура одного колеса системы стабилизации управления автомобилем из раздела Антипробуксовочная система).
Впускной клапан открыт, в тормозном цилиндре создаётся необходимое давление. Выпускной клапан закрыт. Тормозной момент достаточен для удержания автомобиля от скатывания.
Фаза 2 — удержание тормозного давления. Водитель снимает ногу с педали тормоза, чтобы перенести её на педаль акселератора. Ассистент трогания на подъёме в течение 2 секунд сохраняет тормозное давление на том же уровне, чтобы предотвратить скатывание автомобиля назад. В контурах колёс удерживается тормозное давление. Таким образом предотвращается преждевременное снижение давления.
Фаза 3 — дозированное уменьшение тормозного давления. Автомобиль всё ещё неподвижен. Водитель нажимает педаль акселератора. По мере того как двигатель увеличивает передаваемый к колёсам крутящий момент (момент тяги), ассистент трогания уменьшает тормозной момент так, что автомобиль не скатывается назад, но и не оказывается заторможенным при последующем трогании. Впускной клапан открыт.
Фаза 4 — сброс тормозного давления. Автомобиль трогается. Момент тяги достаточен для трогания и последующего ускорения автомобиля. Система помощи при подъёме уменьшает тормозное давление до нуля.
Необходимо отметить, что система работает всегда на подъем, независимо от направления движения, что актуально для трогания на подъеме задним ходом.
В качестве системы помощи при подъеме может использоваться электромеханический стояночный тормоз.
Система помощи при спуске предназначена для предотвращения ускорения автомобиля при движении по горным дорогам. Наличие данной системы на автомобиле повышает удобство управления и безопасность. Система помощи при спуске устанавливается, как правило, на легковые автомобили повышенной проходимости.
Если автомобиль находится на наклонной плоскости, действующая на него сила тяжести раскладывается, по правилу параллелограмма, на нормальную и параллельную составляющие (рис. 16.18). Последняя представляет собой действующую на автомобиль скатывающую силу FH.
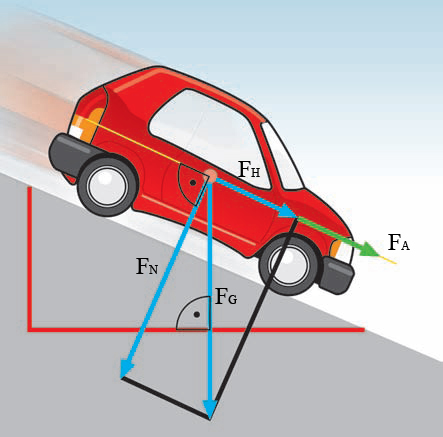
Если на автомобиль действует собственная сила тяги, то она добавляется к скатывающей силе FA. Скатывающая сила действует на автомобиль постоянно, независимо от скорости автомобиля. Вследствие этого автомобиль, скатывающийся по наклонной плоскости, будет всё время ускоряться, т. е. двигаться тем быстрее, чем дольше он скатывается. Чтобы удерживать постоянной скорость автомобиля без ассистента движения на спуске, водителю необходимо будет тормозить и/или включать понижающую передачу и снимать ногу с педали акселератора. Для облегчения действий водителя в этих условиях и обеспечения безопасности при спуске применяется система помощи при спуске, которая задействуется при выполнении следующих условий: скорость автомобиля меньше 20 км/час; уклон превышает 20%; двигатель работает; педали акселератора и тормоза не нажаты. При выполнении указанных условий, получаемые системой данные о положении педали акселератора, частоте вращения коленчатого вала двигателя и скорости вращения колёс (которая слегка превышает скорость пешехода) свидетельствуют об увеличении скорости автомобиля. Система при этом исходит из того, что автомобиль скатывается на спуске и необходимо задействовать тормозную систему. Скорость автомобиля, которую тормозной ассистент должен поддерживать с помощью подтормаживания всех колёс зависит от скорости, с которой было начато движение на спуске, и включённой передачи. В этом случае система движения на спуске включает насос обратной подачи. Клапаны высокого давления и впускные клапаны ABS открываются, а выпускные клапаны ABS закрываются. В тормозных цилиндрах колёс создаётся тормозное давление, и автомобиль замедляется. Притормаживание колёс система осуществляет через гидромодулятор ABS, создающий давление в тормозной системе.
При снижении скорости автомобиля до безопасного значения система помощи при спуске прекращает подтормаживания колёс и вновь снижает давление в тормозной системе. Если после этого скорость начинает увеличиваться при не нажатой педали акселератора, ассистент исходит из того, что автомобиль по-прежнему движется по спуску. Таким образом скорость автомобиля постоянно удерживается в безопасном диапазоне, который легко может управляться и контролироваться водителем.
Система помощи при спуске является программным расширением системы курсовой устойчивости и использует конструктивные элементы данной системы, поэтому по свой сути является функцией, а не системой.
Система помощи при спуске дезактивируется принудительно (повторным нажатием клавиши) или автоматически при нажатии на педаль газа или тормоза, а также снижения величины уклона менее 12%.
Система автоматического включения стояночного тормоза AUTO HOLD. Система AUTO HOLD предназначена для работы в автомобилях, в которых вместо механического установлен электромеханический стояночный тормоз. AUTO HOLD обеспечивает автоматическое удержание на месте остановившегося автомобиля независимо от того, как именно он прекратил движение, и помогает водителю выполнить последующее трогание (вперёд или назад). AUTO HOLD объединяет в себе следующие системы поддержки водителя.
Ассистент движения Stop-and-Go (движение в пробке). Если автомобиль, после медленного выката, останавливается сам, ассистент Stop-and-Go автоматически задействует тормоза для удержания его в этом положении. Это облегчает водителю управление при движении в пробке поскольку ему больше не приходится нажимать педаль тормоза только для удержания остановившегося автомобиля на месте.
Ассистент трогания. Автоматизация процесса остановки и трогания облегчает водителю управление при трогании на подъёме. При трогании ассистент в нужный момент отпускает тормоза. Нежелательного скатывания назад не происходит.
Парковка. Если у остановившегося автомобиля с включённой функцией AUTO HOLD открывается дверь водителя или расстёгивается замок ремня безопасности водителя либо выключается зажигание, система AUTO HOLD автоматически включает стояночный тормоз.
Система AUTO HOLD также является программным расширением системы ESP и требует для своей реализации наличия системы ESP и электромеханического стояночного тормоза.
Для включения системы AUTO HOLD должны быть выполнены следующие условия:
● дверь водителя должна быть закрыта;
● ремень безопасности водителя должен быть пристёгнут;
● двигатель должен быть включён;
● для включения функции AUTO HOLD необходимо нажать клавишу AUTO HOLD. Включение функции AUTO HOLD индицируется загоранием контрольной лампы в клавише.
Если одно из условий перестаёт выполняться, функция AUTO HOLD отключается. После каждого нового включения зажигания функцию AUTO HOLD необходимо заново включать нажатием клавиши.
Принцип работы. Система AUTO HOLD включена. На основании сигналов скорости колёс и выключателя стоп-сигнала AUTO HOLD распознаёт, что автомобиль неподвижен и что педаль тормоза нажата. Созданное ею тормозное давление «замораживается» закрыванием клапанов гидравлического блока, водитель не должен больше удерживать педаль нажатой. То есть при включённой системе AUTO HOLD автомобиль сначала удерживается в неподвижном состоянии с помощью гидравлических тормозных механизмов четырёх колёс.
Если водитель не нажимает педаль тормоза и автомобиль, после того как уже было распознано его неподвижное состояние, вновь начнёт движение, включается система ESP. Она самостоятельно (активно) создаёт тормозное давление в контурах колёс, так чтобы автомобиль прекратил движение. Необходимое для этого значение давления рассчитывается и устанавливается, в зависимости от угла наклона дороги, блоком управления ABS/ESP.
Для создания давления функция включает насос обратной подачи и открывает клапаны высокого давления и впускные клапаны ABS, выпускные и переключающие клапаны закрываются или остаются закрытыми.
Если водитель нажимает педаль акселератора для трогания, выпускные клапаны ABS открываются и насос обратной подачи перекачивает через открытые переключающие клапаны тормозную жидкость в направлении компенсационного бачка. При этом учитывается наклон автомобиля и дороги в ту или иную сторону, чтобы предотвратить скатывание автомобиля.
Через 3 минуты неподвижности автомобиля функция его затормаживания переходит от гидравлической системы ESP к электромеханическому тормозу. При этом блок управления ABS сообщает блоку управления электромеханического тормоза рассчитанное им значение необходимого тормозного момента.
Система помощи движению по полосе. Система помощи движению по полосе (другие наименования – ассистент движения по полосе, система удержания полосы движения) помогает водителю придерживаться выбранной полосы движения и тем самым, предотвращать аварийные ситуации. Система эффективна при движении по автомагистралям и обустроенным федеральным дорогам, т.е. там, где имеется качественная дорожная разметка.
Различают два вида систем помощи движения по полосе: пассивные и активные. Пассивная система предупреждает водителя об отклонении от выбранной полосы движения. Активная система наряду с предупреждением производит корректировку траектории движения.
У разных автопроизводителей система удержания полосы движения имеет свои торговые названия, но предлагаемые системы имеют, в основном, схожую конструкцию:
Lane Assist от Audi, Volkswagen, SEAT;
Lane Departure Warning System от BMW, Citroen, Kia, Ceneral Motors, Opel, Volvo;
Lane Departure Prevention от Infiniti;
Lane Keep Assist System от Honda, Fiat;
Lane Keeping Aid от Ford;
Lane Keeping Assist от Mercedes-Benz;
Lane Keeping Support System от Nissan;
Lane Monitoring System от Toyota.
Система помощи движению по полосе является электронной системой и включает клавишу управления, видеокамеру, блок управления и исполнительные механизмы. С помощью клавиши управления производится включение системы. Клавиша может располагаться на рычаге переключения указателей поворота, панели приборов или центральной консоли.
Видеокамера производит запись изображения на определенном расстоянии от автомобиля и его оцифровку. В системе используется монохромная камера, которая распознает линии разметки как резкое изменение градации серого. Камера объединена с блоком управления. Объединенный блок располагается на лобовом стекле за зеркалом заднего вида.
Исполнительными устройствами системы помощи движения по полосе являются контрольная лампа, звуковой сигнал, вибромотор на рулевом колесе, нагревательный элемент лобового стекла, электродвигатель электромеханического усилителя руля.
Во время работы активной системы помощи движения по полосе реализуются следующие основные функции:
распознавание траектории полосы движения;
визуальное информирование о работе системы;
корректировка траектории движения;
предупреждение водителя.
Обстановка перед автомобилем проецируется на светочувствительную матрицу камеры и преобразуется в черно-белое изображение, которое анализируется электронным блоком управления.
Алгоритм работы блока управления определяет положение линий разметки полосы, оценивает качество распознавания разметки, вычисляет ширину полосы и ее кривизну, рассчитывает положение автомобиля на полосе. На основании проведенных вычислений осуществляются управляющее воздействие на рулевое управление (тормозную систему), и если требуемый эффект удержания автомобиля на полосе не достигается — предупреждается водитель (вибрация рулевого колеса, звуковой и световой сигналы).
Пассивная система помощи движению по полосе использующая видеокамеру. Слежение за разметкой, задающей границы полосы, осуществляется с помощью видеокамеры. Окно камеры расположено в области ветрового стекла, которая очищается щётками стеклоочистителей, что позволяет свести к минимуму ограничение видимости, вызываемое осадками в виде дождя и снега.
Если система распознаёт линии разметки полосы движения по обеим её сторонам, она находится в рабочем состоянии (активирована), о чем свидетельствует зеленая лампа подсветки.
Если автомобиль приближается к одной из линий разметки и может выйти за пределы полосы, водитель предупреждается об этом посредством вибрации рулевого колеса.
Если при активированном ассистенте перед перестроением на другую полосу будет включён сигнал поворота, предупредительного сигнала не последует, поскольку данное перестроение система воспринимает как запланированное. Предупреждение посредством вибрирующего сигнала при приближении к отслеживаемой линии разметки или при её пересечении производится только один раз. Второй предупредительный сигнал следует лишь в том случае, если после первого сигнала автомобиль удаляется на достаточное расстояние от отслеживаемой линии разметки и после этого снова приближается к ней.
Активная система помощи движению по полосе использующая видеокамеру. С внедрением электромеханического усилителя рулевого управления и электронной педали акселератора открылись новые возможности для непосредственного и активного влияния на ходовые качества и на повышение безопасности движения, а также для обеспечения активной помощи водителю в ходе выполнения им сложных манёвров. В автомобильную технику пришли функции, которые до этого были прерогативой либо живых существ, либо амбициозных проектов робототехники – оптическое восприятие ситуации (зрение), оценка ситуации (мышление) и реакция на ситуацию (действие).
В связи с этим дальнейшим развитием системы помощи движению по полосе является возможность электронной системы автомобиля вмешиваться в рулевое управление в критических ситуациях. На основании оптических данных электронная система определяет траекторию дороги и активно вмешивается в рулевое управление, если существует опасность непреднамеренного выхода автомобиля за пределы полосы движения, ограниченной внутренней и внешней полосами дорожной разметки.
Система помощи движению по полосе при наличии электромеханического усилителя рулевого управления и электронной педали акселератора может выполнять следующие функции:
● Распознавание траектории полосы движения при наличии линий дорожной разметки или достаточного контраста между дорожным покрытием и обочиной.
● Предоставление водителю визуальной информации о режиме работы ассистента движения по полосе.
● Корректирующее или вспомогательное вмешательство в работу рулевого управления.
● Предупреждение водителя путём ощутимой вибрации, если вмешательства системы движения по полосе недостаточно, чтобы компенсировать уход с полосы движения.
● Подача визуальных и звуковых сигналов, если водитель на определённое время отпустил рулевое колесо (распознавание отпущенного рулевого колеса).
● Подавление функций системы при преднамеренной смене полосы движения, например, при манёвре обгона.
После включения системы помощи движению по полосе система с помощью установленной в блок управления ассистента движения по полосе камеры начинает распознавать и оценивать обстановку на дороге перед автомобилем. При этом блок управления системы пытается на основании входных оптических данных определить границы полосы движения, осевую линию разметки и положение собственного автомобиля на полосе движения. Если системе удаётся в рамках системных границ получить эти данные, то она остаётся в активном режиме. В противном случае система переходит в пассивный режим. Индикация текущего режима работы системы осуществляется с помощью контрольной лампы (активный режим – зеленый цвет, пассивный режим – желтый цвет).
В активном режиме работы система определяет траекторию дороги и при опасности выхода автомобиля за пределы полосы движения создаёт корректирующий крутящий момент поворота рулевого колеса с помощью привода электромеханического усилителя рулевого управления. В пассивном режиме работы камера продолжает слежение за дорогой, а система анализирует поступающие данные, чтобы при распознавании однозначно идентифицируемой дорожной разметки или при наличии всех необходимых рамочных условий снова переключиться в активный режим работы. Контрольная лампа сообщает водителю о том, что система находится в пассивном режиме и корректирующее воздействие на рулевое управление и подача предупредительных сигналов не производятся. При преднамеренной смене полосы движения, например, при обгоне или повороте, включение указателей поворота временно переводит систему в пассивный режим работы. Он автоматически включается при выключении указателей поворота и при повторном распознавании однозначно идентифицируемой дорожной разметки.
На прямом участке дороги на основании распознанной дорожной разметки ассистент движения по полосе рассчитывает виртуальную полосу движения, по которой разрешено движение автомобиля (рис. 16.19, а). Дополнительно система определяет положение самого автомобиля относительно траектории этой виртуальной полосы. При возникновении опасности выхода автомобиля за пределы виртуальной полосы движения система рассчитывает корректирующий подруливающий момент, противодействующий отклонению автомобиля от полосы и равный максимум 3 Нм, и реализует его через электромеханический усилитель рулевого управления (рис. 16.19, б).
Сила корректирующего воздействия зависит от угла, под которым автомобиль приближается к распознанной границе полосы движения. Корректирующее подруливание действует максимум в течение 100 секунд или прекращается, если автомобиль в пределах этого временного отрезка возвращается на траекторию полосы движения. Водитель может в любое время без особых усилий преодолеть корректирующее воздействие активным рулением, например, при преднамеренной смене полосы движения без включения указателей поворота. Если момента, корректирующего подруливания недостаточно, чтобы удержать автомобиль в пределах полосы движения, то электродвигатель электромеханического усилителя рулевого колеса возбуждает вибрацию рулевого механизма, ощущаемую водителем в качестве предупредительного сигнала.
При движении автомобиля в повороте, даже при затяжных поворотах, то есть при большом радиусе поворота ассистент движения по полосе способен предотвращать отклонение автомобиля от расчётной полосы движения. При этом виртуальная полоса движения рассчитывается системой так, чтобы внутренняя граница виртуальной полосы совпадала с распознанной реальной дорожной разметкой полосы движения с внутренней стороны поворота. Если максимального времени корректирующего вмешательства в 100 секунд недостаточно для удержания автомобиля в пределах полосы движения на повороте, то включается сигнализация с помощью вибрации, раздаётся предупредительный звуковой сигнал, а также появляется текстовое сообщение на дисплее комбинации приборов, призывающие водителя взять рулевое управление на себя.
Наряду с контролем за движением автомобиля в пределах полосы система также следит за тем, не отпустил ли водитель рулевое колесо на определённый период времени и тем самым оказался не готов к рулению, например, вследствие усталости или из-за отвлекающих действий.
При движении автомобиля неровности дорожного покрытия создают усилия, воспринимаемые рулевым механизмом. Если водитель удерживает рулевое колесо как минимум одной рукой, указанные выше силы приводят к тому, что через шестерню рулевой колонки на нижний конец торсиона воздействуют постоянно меняющиеся моменты, пытающиеся повернуть рулевую колонку на небольшую величину. Поскольку водитель удерживает рулевое колесо, то верхний конец торсиона остаётся неподвижным. При этом торсион постоянно скручивается влево и вправо на небольшой угол. Эти непрерывные изменения угла скручивания торсиона измеряются с помощью датчика момента поворота рулевого колеса и в результате обработки сигнала в блоке управления усилителя рулевого управления возникает непрерывная последовательность сигналов, которая не прекрщается, пока водитель удерживает рулевое колесо и не производит намеренного руления. Наличие серии таких сигналов сообщает ассистенту движения по полосе о том, что водитель удерживает рулевое колесо.
Если водитель отпускает рулевое колесо, то верхний конец торсиона перестаёт быть неподвижным. Весь рулевой механизм, включая рулевое колесо, может свободно вращаться. Теперь, в отличие от положения удержания водителем рулевого колеса, крутящие моменты, возникающие из-за неровностей дорожного покрытия, не приводят к переменному скручиванию торсиона, так что датчик крутящего момента не регистрирует никаких изменений угла скручивания. Последовательность сигналов отсутствует. Если система обнаруживает, что это состояние длится более 8 секунд, то включается предупредительный сигнал, указывающий водителю на опасность, могущую возникнуть в результате отпускания рулевого колеса.
Система помощи движению по полосе предназначена для использования при движении по магистралям и шоссе. Поэтому он работает при скорости свыше 65 км/ч. В неблагоприятных условиях, например, при загрязнённом или заснеженном дорожном полотне, при слишком узкой полосе движения или при неоднозначной разметке полос, как это имеет место на ремонтных участках магистралей, ассистент временно деактивируется.
Система помощи при перестроении (ассистент смены полосы движения). Перестроение автомобиля из одного ряда движения в другой часто становиться причиной аварий, т.к. водитель не замечает транспортные средства на других полосах. Система помощи при перестроении (другие названия – система мониторинга «слепых» зон, система информирования о «мертвой» зоне, система безопасного перестроения из ряда в ряд) предупреждает водителя об опасности столкновения при смене полосы движения. Разновидностью система помощи при перестроении является система помощи движению по полосе. Эта система помогает водителю придерживаться выбранной полосы движения и тем самым, предотвращать аварийные ситуации.
Известными разработчиками таких систем являются:
Audi, Volkswagen — система Side Assist;
BMW — система Lane Change Warning;
Mazda — система Rear Vehicle Monitoring, RVM;
Mercedes-Benz — система Blind Spot Assist;
Porshe — система Spurwechselassistent, SWA;
Ford — система Blind Spot Infomation System, BLISTM;
Volvo – система Blind Spot Information System, BLIS.
Система Audi Side Assist признана Европейским комитетом независимой экспертизы безопасности автомобилей (Euro NCAP) одной из лучших систем безопасности 2010 года.
Система включает следующие конструктивные элементы:
кнопка (клавиша) включения на рычаге переключателя указателя поворотов (на панели двери);
радары в наружных зеркалах заднего вида с правой и левой стороны;
электронные блоки управления;
сигнальные лампы (предупреждающие индикаторы) на наружных зеркалах заднего вида с правой и левой стороны;
вибромотор на рулевом колесе;
контрольная лампа на панели приборов.
Электронные блоки управления (по одному на каждую сторону) анализируют отраженные излучения радара, на основании которых:
производится слежение за подвижными объектами;
распознаются неподвижные объекты (припаркованные автомобили, дорожное ограждение, столбы и др.);
при необходимости включается сигнальная лампа.
Сигнальная лампа работает в двух режимах:
информирования – горит непрерывно при нахождении объекта в «слепой» зоне;
предупреждения – мигает при перестроении из ряда в ряд и при нахождении объекта в «слепой» зоне.
Ассистент смены полосы движения оповещает и предупреждает водителя о потенциальной опасности при перестроении в другой ряд с помощью встроенных в наружные зеркала заднего вида сигнальных ламп (рис. 16.20).

При обнаружении помехи на одной из соседних полос в зеркале соответствующей стороны загорается сигнальная лампа. Если водитель не перестраивается в другой ряд, то сигнальная лампа горит непрерывным светом, сообщая этим о наличии помехи. Когда водитель включает указатели поворота, то есть хочет перестроится в занятый соседний ряд, сигнальная лампа предупреждает его об опасности четырехкратным миганием.
Ниже в качестве примера описываются две типичные дорожные ситуации, в которых ассистент смены полосы движения подает предупреждающий сигнал (рис. 16.21).
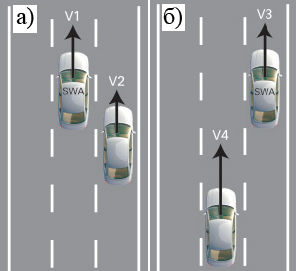
Ситуация 1. Оборудованный SWA автомобиль V1 движется по средней полосе трехполосной магистрали и опережает движущееся справа транспортное средство V2 (рис. 16.21, а). Скорость автомобиля с SWA превышает скорость обгоняемого автомобиля меньше, чем на 15 км/ч. Обгон с такой скоростью требует времени, так что обгоняемый автомобиль в какой-то момент попадает в мертвую зону. В этой ситуации сигнальная лампа в правом наружном зеркале сообщает водителю, что правая полоса движения занята. Если водитель автомобиля с SWA включает правый указатель поворота, то четырехкратное мигание сигнальной лампы в правом зеркале предупреждает его об опасности.
Ситуация 2. Автомобиль V3 с SWA движется со средней скоростью по правой полосе трехполосной магистрали (рис. 16.21, б). По средней полосе его быстро нагоняет другое транспортное средство V4. Ассистент смены полосы движения обнаруживает приближающийся автомобиль и зажигает сигнальную лампу в левом наружном зеркале. Если водитель включает левые указатели поворота, то сигнальная лампа начинает мигать и этим предупреждает водителя об опасности столкновения. Максимальное расстояние между двумя автомобилями, при котором включаются сигнальные лампы, зависит от разности скоростей движения. Чем выше разность скоростей, тем это расстояние больше. Но в любом случае оно не превышает 50 м, потому что 50 м – это предел обнаружения помехи радарами.
Парковочная система (другое наименование – система помощи при парковке, обиходное название – парктроник) является вспомогательной системой активной безопасности автомобиля, облегчающей процесс парковки автомобиля. Наибольшая эффективность от применения парковочной системы реализуется при движении автомобиля задним ходом, в темное время суток, при сильной тонировке стекол, а также в стесненных условиях (парковка, гараж и др.).
Парковочные системы можно условно разделить на две большие группы – пассивные (предупреждающие) и активные (автоматические). Пассивные парковочные системы представляют только необходимую для парковки информацию, при этом управление автомобилем осуществляется водителем. Активные парковочные системы обеспечивают парковку автомобиля в автоматическом или автоматизированном (автоматически выполняются отдельные функции) режиме.
Пассивные парковочные системы устанавливаются на автомобиль при покупке в качестве опции или отдельно. На один автомобиль может быть установлено несколько пассивных парковочных систем. В основу работы пассивных парковочных систем положен контроль расстояния до препятствия и информирование водителя об этом.
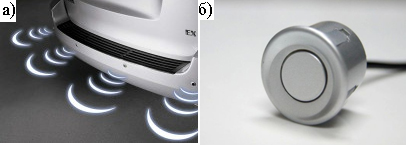
Предупреждающие системы. Звуковая система представляет собой систему, позволяющую водителю по звуковым сигналам, находящемся на рабочем месте водителя оценить расстояние до ближайшего препятствия. Система состоит из нескольких датчиков (рис. 16.22) (передающих и принимающих) в переднем и заднем бампере автомобиля, основного блока управления, блока управления дисплея, зуммеров, дисплея.
Датчик выполнен из алюминиевого корпуса с селективной степенью затухания пьезоэлектрической пластины в качестве генератора сигналов и снабжен электронной схемой для генерирования ультразвуковых волн и оценки отраженных и принимаемых волн.
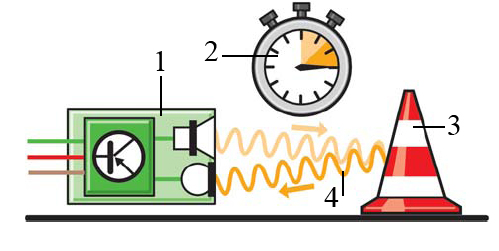
Ультразвуковые датчики представляют собой небольшие приёмопередающие модули (рис. 16.23). Принцип работы датчиков базируется на излучении ультразвукового сигнала, неслышного для человека. Этот сигнал распространяется в виде звуковых волн в окружающей среде с постоянной скоростью. Звуковые волны представляют собой происходящие концентрические волнообразные изменения плотности и давления частиц окружающего воздуха. Скорость распространения звука зависит от плотности среды, в которой он движется. При нормальном давлении и температуре 20 °C звук распространяется в воздухе со скоростью 343 м/с. Зависимость скорости распространения звука от температуры является основанием для использования системой управления сигнала от датчика наружной температуры в качестве корректирующей величины. Звуковые волны, попадая на предмет (например, на стену), отражаются от него в степени, зависящей от характеристик предмета. Это означает, что звуковые волны возвращаются к датчику и принимаются его микрофоном. При этом датчик измеряет время, прошедшее между отправкой сигнала и приёмом отражённых волн. На основании измерения этого времени блок управления может определить расстояние от автомобиля до предмета.
Передаваемые уровни соответствуют напряжению логической схемы и, следовательно, нечувствительны к возмущению, поэтому отсутствует необходимость в экранировании сигнальных линий.
Датчики включаются циклически каждые 25 мс и генерируют ультразвуковой импульс продолжительностью примерно 1 мс. Все датчики затем переключаются на режим «прослушивания», для того чтобы воспринимать отраженные волны. Расстояние до препятствия, от которого отражаются волны, вычисляется посредством оценки длительности прохождения сигнала (длительности прохождения волн от передатчика до принимающего датчика). Кратчайшее расстояние от препятствия до бампера показывается водителю на дисплее.
При движении вперед со скоростью ниже 15 км/час работают только датчики, расположенные на переднем бампере. Во время переключения на передачу заднего хода приводятся в действие датчики на заднем бампере.
Блок управления системы служит для подачи напряжение питания к датчикам, оценки и обработки сигналы датчиков, управления предупреждающими зуммерами, передачи блоку управления передней панели управления, индикации и выдачи информации данные, необходимые для вывода изображения на дисплей.
Звуковой сигнал подается предупреждающими зуммерами. Расстояние, на котором датчики парковочной системы однозначно различают препятствия, зависит от места их установки.
Прерывистый сигнал становится непрерывным, когда расстояние до препятствия сокращается до 25…35 см.
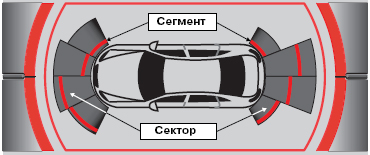
При наличии дисплея в дополнение к звуковому предупреждению на дисплее отображается фактическое расстояние от отдельных датчиков до имеющихся препятствий. В более простых системах расстояние до препятствия отображается в цифрах. В более сложных конструкциях контролируемая зона разбита на секторы по числу датчиков (рис. 16.24). В каждом из секторов имеется красная метка, которая отмечает расстояние между датчиком и ближайшим к нему препятствием. Когда расстояние между автомобилем и препятствием сокращается, соответствующая красная метка на экране приближается к автомобилю.
Отдельные автомобили могут оснащаться камерой заднего вида, позволяющей контролировать ситуацию позади автомобиля, передавая изображение на дисплей. Камера встраивается в ручку двери багажного отсека и позволяет водителю видеть то, что происходит сзади. Изображение с камеры появляется на дисплее автоматически при включении передачи заднего хода.
Парковочный ассистент и камера заднего вида лишь помогают водителю в обзоре пространства вокруг автомобиля и оценке расстояния до препятствий, поэтому впоследствии стали применять более совершенные системы парковки.
Следующим поколением развития парковочных систем являются активные парковочные системы.
Система автоматической парковки. Система автоматической парковки (другое наименование — интеллектуальная система помощи при парковке, обиходное название – парковочный автопилот) относится к активным парковочным системам, т.к. обеспечивает парковку автомобиля в автоматическом или автоматизированном (автоматически выполняются отдельные функции) режиме.
Различные системы автоматической парковки помогают при выполнении параллельной или перпендикулярной парковки. Больше распространены системы с параллельной парковкой. Автоматическая парковка осуществляется за счет согласованного управления углом поворота рулевого колеса и скорости движения автомобиля.
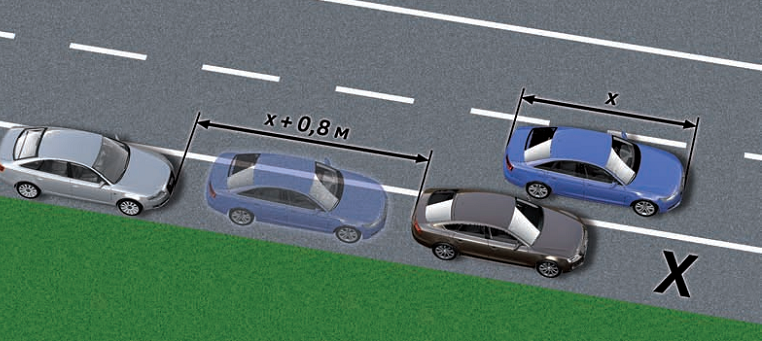
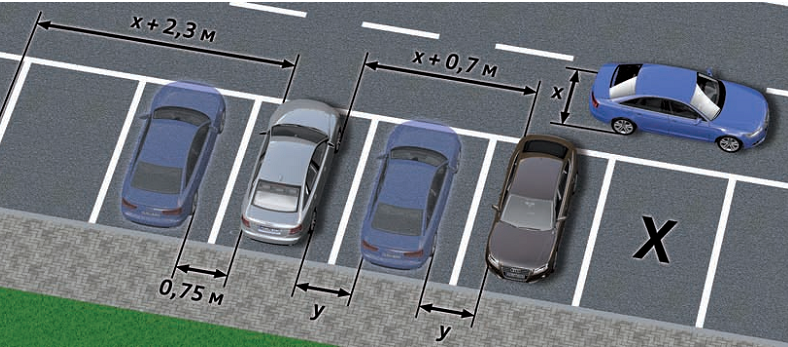
При параллельной парковке (вдоль края приезжей части) система определяет место для парковки как пригодное, если оно как минимум на 0,8 м больше, чем собственная длина автомобиля (x + 0,8 м) (рис. 16.25).
Подходящие продольные места для парковки распознаются при проезде вдоль припаркованных автомобилей, если скорость движения автомобиля ниже 40 км/ч. Подходящие места для парковки предлагаются системой, если они находятся между двумя припаркованными автомобилями или за припаркованным автомобилем. Парковка перед стоящим автомобилем системой не поддерживается.
При поперечной парковке (рис. 16.26) система определяет место для парковки как пригодное если измеренная ширина места для парковки превышает ширину автомобиля не менее чем на 2,3 м (x + 2,3 м).
Подходящие поперечные места для парковки распознаются при проезде вдоль припаркованных автомобилей, если скорость движения автомобиля ниже 20 км/ч.
Место для парковки, может находиться между двумя автомобилям, за другим автомобилем или рядом с ним. Система оценивает место для парковки между двумя автомобилями как подходящее, если его ширина равна ширине автомобиля x + 0,7 м. В таком случае парковочный автопилот выровняет автомобиль по центру относительно обоих автомобилей, обеспечив до них расстояние y.
Если измеренная ширина места для парковки превышает ширину автомобиля не менее чем на 2,3 м (x + 2,3 м), то парковка выполняется рядом с одним из автомобилей на расстоянии 0,75 м от него. В этом случае автомобиль будет припаркован параллельно соседнему автомобилю.
Конструкция системы автоматической парковки включает ультразвуковые датчики, выключатель, электронный блок управления, а также исполнительные устройства систем автомобиля.
Электронный блок управления принимает сигналы от ультразвуковых датчиков и преобразует их в управляющие воздействия на исполнительные устройства, в качестве которых выступают другие системы автомобиля: курсовой устойчивости, управления двигателем, электроусилитель рулевого управления, автоматическая коробка передач. Взаимодействие с указанными системами осуществляется через соответствующие электронные блоки управления.
Парковка транспортного средства может осуществляться двумя способами – непосредственно водителем с помощью предлагаемых системой инструкций или автоматически без участия водителя. Визуальные и тестовые инструкции водителю выводятся на информационный дисплей.
Такая система осуществляет не только осмотр пространства вокруг автомобиля, но и самостоятельно поворачивает рулевое колесо с электроусилителем рулевого управления при парковке автомобиля задним ходом. Водитель при этом управляет во время парковки педалями акселератора, сцепления или тормоза. При необходимости в любой момент времени водитель может взять на себя контроль рулевого управления и прервать процесс автоматической парковки. Наряду с парковкой автомобиля задним ходом к правой стороне дороги в системе предусмотрена возможность парковки и к левой стороне дороги, например, для улиц с односторонним движением.
Парковочный автопилот является примером взаимодействия различных систем автомобиля с использованием коммуникаций по шине CAN для выполнения комплексной функции, как, например, активного руления при парковке. Наряду с парковочным автопилотом задействованы следующие подсистемы: электромеханический усилитель рулевого управления; тормозная система с ABS и ESP; управление двигателя и коробки передач; электронные составляющие приборной панели и рулевой колонки; система распознавания прицепа.
Процесс парковки задним ходом с использованием парковочного автопилота можно разделить на четыре этапа:
1. Активирование парковочного автопилота.
2. Поиск подходящего свободного места на стоянке.
3. Парковка с использованием функции руления.
4. Завершение процесса парковки.
Активирование парковочного автопилота. Парковочный автопилот имеет отдельные функции парковочного ассистента и самостоятельного поворота рулевого колеса при парковке. Включение и выключение этих функций осуществляется двумя разными кнопками. Сначала водитель должен решить, будет ли он самостоятельно парковать автомобиль, пользуясь при этом системой контроля дистанции при парковке, или это выполнит парковочный автопилот задним ходом, предоставив водителю управление только педалями акселератора, сцепления и тормоза. Водитель должен выбрать, будет ли он парковаться задним ходом к правой стороне дороги или же парковка будет произведена к левой стороне дороги (например, при движении по улице с односторонним движением). Возможно также самостоятельно припарковать автомобиль, а парковочный автопилот использовать лишь для поиска подходящего свободного места на парковке.
Парковка с использованием функции руления. Водитель запускает процесс автоматической парковки следующим образом: на стоящем автомобиле он включает передачу заднего хода, нажимает на педаль акселератора и отпускает педаль тормоза. При этом водитель не должен поворачивать рулевое колесо. Соответствующая индикация на дисплее комбинации приборов указывает лишь на то, что включён режим автоматического руления, и водитель должен следить за обстановкой вокруг автомобиля, чтобы в случае опасности прервать процесс парковки или завершить его вручную.
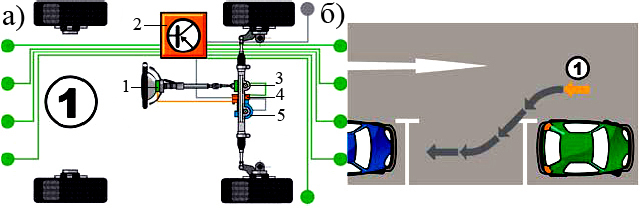
Процесс парковки автомобиля задним ходом поделён блоком управления парковочного автопилота на пять этапов. Это необходимо потому, что система не имеет возможности непосредственного визуального контроля для реагирования на индивидуальное развитие процесса. Проще говоря, в «памяти» сохранён стандартизированный процесс парковки, который при необходимости воспроизводится в пять этапов. Таким образом, парковочный автопилот поэтапно следует заранее заданной траектории.
Сначала колёса приводятся в положение прямолинейного движения и автомобиль немного проезжает назад, как только водитель нажимает на педаль акселератора и отпускает педаль тормоза (этап 1, рис. 16.27).
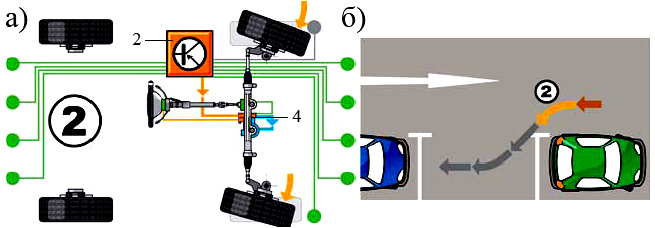
Затем от блока управления парковочного автопилота 2 на блок управления усилителя рулевого управления 4 поступает сигнал о том, что колёса необходимо повернуть вправо. При этом автомобиль задним ходом въезжает в свободное место на парковке под углом к линии припаркованных автомобилей (этап 2, рис. 16.27). Водитель должен следить за тем, чтобы скорость движения не превышала 7 км/ч. При превышении этого значения система автоматически прерывает процесс парковки.
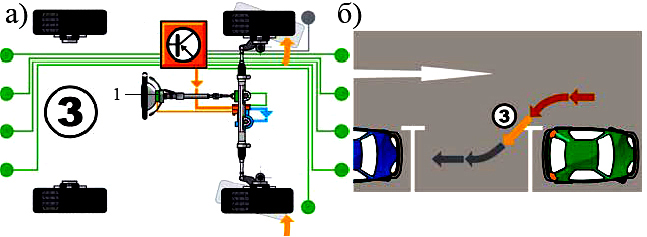
Используя данные о дистанции от ультразвуковых датчиков и сигналы, поступающие от датчика угла поворота рулевого колеса 1, парковочный автопилот контролирует положение автомобиля в свободном пространстве между припаркованными автомобилями и, руководствуясь записанными в память блока управления сегментами движения, определяет, с какого момента колёса необходимо вновь привести в положение прямолинейного движения, чтобы продолжить въезд на место для парковки (этап 3, рис. 16.27).
По окончании третьего этапа движения колёса поворачиваются влево (этап 4, рис. 16.27) для того, чтобы автомобиль мог въехать на парковочное место. Автомобиль заезжает в свободное пространство и встаёт параллельно к проезжей части. При уменьшении расстояния до объекта за автомобилем до минимального безопасного значения раздаётся звуковой сигнал, как и при работе парковочного ассистента.
Завершение процесса парковки. Если автомобиль припаркован не параллельно бордюру или стене, то парковочный автопилот распознаёт эту ситуацию (рис. 16.27). Теперь, при стоящем автомобиле, водитель должен выключить передачу заднего хода, подождать до тех пор, пока колёса установятся в положение прямо и включить первую передачу. Теперь автомобиль должен проехать немного вперёд до тех пор, пока индикатор на дисплее не укажет на завершение процесса парковки. Если парковочный автопилот считает, что процесс парковки завершён, то сообщение на дисплее «Функция руления активна! Следить за обстановкой!» меняется на «Автоматическая парковка завершена!». При этом отключается режим автоматического руления и в кнопке парковочного автопилота гаснет контрольная лампа.
В интеллектуальной системе помощи при парковке используются ультразвуковые датчики, аналогичные пассивной парковочной системе, но имеющие большую дальность действия (до 4,5 м). Количество датчиков в зависимости от разновидности системы различается. Например, в системе Park Assist последнего поколения устанавливается 12 ультразвуковых датчиков: 4 – впереди, 4 сзади и 4 по бокам автомобиля.
Включение системы осуществляется принудительно при необходимости осуществить парковку. Для этого на панели приборов (рулевом колесе) имеется специальный выключатель.
В интеллектуальной системе помощи при парковке используются ультразвуковые датчики, аналогичные пассивной парковочной системе, но имеющие большую дальность действия (до 4,5 м). Количество датчиков в зависимости от разновидности системы различается. Например, в системе Park Assist последнего поколения устанавливается 12 ультразвуковых датчиков: 4 – впереди, 4 сзади и 4 по бокам автомобиля.
Включение системы осуществляется принудительно при необходимости осуществить парковку. Для этого на панели приборов (рулевом колесе) имеется специальный выключатель.
Система кругового обзора является вспомогательной системой активной безопасности, при этом автомобиль оборудуется видеокамерами. Она предназначена для оказания помощи водителю при выполнении маневрирования в стесненных условиях (параллельная парковка, перпендикулярная парковка, движение между рядами, выезд на «слепой» перекресток).
В качестве примера рассмотрим систему кругового обзора окружающего пространства с несколькими камерами Area View. Это вспомогательная система для водителя, устанавливаемая представляет собой реализованную с помощью камер систему обзора окружающего пространства, и является дальнейшим развитием камеры заднего вида. В то время, как камера заднего вида отображает только область позади автомобиля, система Area View позволяет водителю контролировать всё пространство вокруг автомобиля.
Она предоставляет водителю множество вариантов отображения и настроек, которые он может целенаправленно выбирать в зависимости от дорожной обстановки и необходимости в информации.
Воспроизведение кругового обзора окружающей обстановки вокруг автомобиля реализуется с помощью четырёх камер, которые скрыто установлены на автомобиль (рис. 16.28).

Передняя камера находится в решётке радиатора, задняя камера — в ручке двери багажного отсека, а боковые камеры размещены в нижней части наружных зеркал заднего вида.
Широкоугольные камеры фиксируют всё пространство вокруг автомобиля, просматривая «мёртвые зоны».
Камеры подключены к блоку управления камер наружного наблюдения по высокоскоростным линиям передачи данных. По этим линиям обеспечивается питание камер и управление ими, а также передача видеосигнала в цифровом формате с помощью LVDS (передача дифференциальными сигналами малых напряжений).
При включении передачи заднего хода, или нажатии клавиши системы парковки на дисплее радионавигационной системы с сенсорным экраном появляется соответствующее миниатюрное изображение автомобиля с перспективы птичьего полёта и при желании водителя детальное отображение для правой, левой, передней или задней стороны соответствующей зоны.
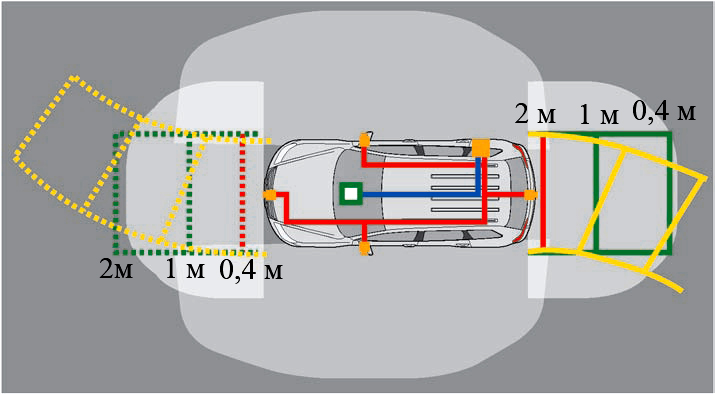
В зависимости от выбранного режима (вида) отображения показываются статические и динамические вспомогательные линии. Эти вспомогательные линии позволяют более точно определить дистанцию (прямоугольные линии красного или зелёного цвета) и отобразить возможную траекторию движения в зависимости от угла поворота рулевого колеса (изогнутые линии жёлтого цвета) (рис. 16.29).
Отображение «с перспективы птичьего полёта» получается из четырёх отдельных изображений, передаваемых камерами. Блок управления рассчитывает общий вид окружающего автомобиль пространства. При таком режиме дополнительно отображается силуэт автомобиля при виде сверху (рис. 16.30, а).
Отображение в режиме «помехи в поперечном направлении» (рис. 16.30, б) позволяет водителю получить обзор более чем на 90° влево и вправо с самой передней точки автомобиля, образно говоря, заглянуть за угол и оценить дорожную обстановку.
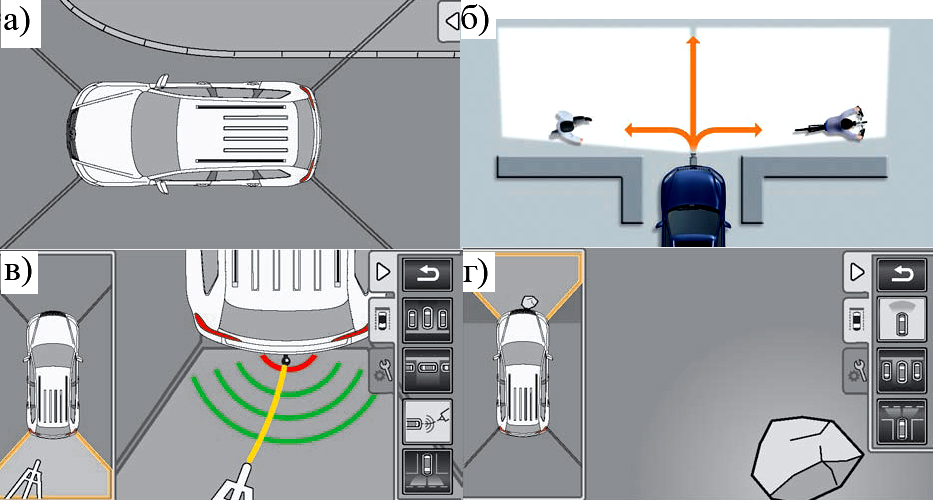
Отображение «помощь при подсоединении прицепа» (рис. 16.30, в) облегчает водителю процесс подсоединения прицепа. Для реализации функции используется задняя камера. Водитель получает изображение пространства позади автомобиля при виде сверху.
Отображение «пересечённая местность» (рис. 16.30, г) оказывает водителю помощь при движении по пересечённой местности и при наличии трудно определяемых препятствий, отображая их непосредственно перед автомобилем с перспективы птичьего полёта.
Система распознавания дорожных знаков. Одной из основных причин дорожно-транспортных происшествий с тяжелыми последствиями является превышение скорости. Система распознавания дорожных знаков призвана предупреждать водителей о необходимости соблюдения скоростного режима. В большинстве случаев эти системы распознают лишь знаки ограничения скорости, но существует и те, которые подают сигнал о запрете обгона и одностороннем движении.
Применяемые на автомобилях системы распознавания дорожных знаков имеют типовую конструкцию, которая включает видеокамеру, блок управления и экран. Для правильной работы в сложных погодных условиях камера оснащается инфракрасным прожектором.
Видеокамера располагается на ветровом стекле за зеркалом заднего вида. Камера снимает пространство перед автомобилем в зоне расположения дорожных знаков (справа и сверху по ходу движения) и передает изображение в электронный блок управления. Видеокамера также используется другими системами активной безопасности — системой обнаружения пешеходов, системой помощи движению по полосе.
Электронный блок управления реализует следующий алгоритм работы:
- распознавание формы дорожного знака (круглая форма);
- распознавание цвета знака (красный цвет на белом);
- распознавание надписи (величина скорости);
- распознавание информационной таблички (вид транспорта, время действия, зона действия);
- анализ фактической скорости автомобиля;
- сравнение скорости автомобиля с максимально допустимой скоростью;
- визуальное и звуковое предупреждение водителя при отклонении.
Изображение в виде знака, например, ограничения скорости выводится на экран панели приборов (расположен внутри спидометра, на некоторых моделях – на лобовом стекле (рис. 16.31) и остается видимым, пока ограничение не закончится или будет изменено.

В ряде конструкций системы распознавания дорожных знаков электронный блок взаимодействует с навигационной системой, а именно в своей работе использует данные о знаках ограничения скорости из навигационных карт. Даже если знак не будет определен видеокамерой, информация о нем будет выведена на панель приборов. Это также может быть и звуковой сигнал.
Точность распознавания вышеуказанной системы зависит от скорости передвижения транспортного средства, погодных условий, больших автомобилей, находящихся на обочине и деревьев.
Системы обнаружения движущихся объектов на проезжей части дороги. Система обнаружения пешеходов. Все большее распространение получают системы активной безопасности, обнаруживающие опасность и предупреждающие о ней водителя. Камера и радары, установленные на автомобиле, позволяют безопасно парковаться, перестраиваться из ряда в ряд, обнаруживать на своем пути другие автомобили, пешеходов и даже диких животных.
Система обнаружения пешеходов предназначена для предотвращения столкновения с пешеходами. Система распознает людей возле автомобиля, автоматически замедляет автомобиль, снижает силу удара и даже избегает столкновения. Применение системы позволяет на 20% сократить смертность пешеходов при дорожно-транспортном происшествии и на 30% снизить риск тяжелых травм.
Впервые система обнаружения пешеходов была использована на автомобилях Volvo в 2010 году. В настоящее время система имеет ряд модификаций:
Pedestrian Detection System от Volvo;
Advanced Pedestrian Detection System от TRW;
EyeSight от Subaru.
В системе обнаружения пешеходов реализованы следующие взаимосвязанные функции:
- обнаружение пешеходов;
- предупреждение об опасности столкновения;
- автоматическое торможение.
Для обнаружения пешеходов используется одну или две видеокамеры и радар, которые эффективно работают на расстоянии до 40 м. Если пешеход обнаружен видеокамерой и результат подтвержден радаром, система отслеживает движение пешехода, прогнозирует его дальнейшее перемещение и оценивает вероятность столкновения с автомобилем. Результаты обнаружения выводятся на экран мультимедийной системы (рис. 16.32). Система также реагирует на транспортные средства, которые стоят на месте или движутся в попутном направлении.

Если системы установила, что при текущем характере движения автомобиля столкновение с пешеходом неизбежно, посылается звуковое предупреждение водителю. Далее система оценивает реакцию водителя на предупреждение – изменение характера движения автомобиля (торможение, изменение направления движения). Если реакция отсутствует, система обнаружения пешеходов автоматически доводит автомобиль до остановки. В этом качестве система обнаружения пешеходов является производной системы автоматического экстренного торможения.
Система обнаружения пешеходов позволяет полностью избежать столкновения на скорости до 35 км/ч. При большей скорости система не может полностью предотвратить дорожно-транспортное происшествие, но тяжесть последствий для пешехода может быть уменьшена за счет замедления автомобиля перед столкновением. Статистические данные свидетельствуют, что вероятность смертельного исхода от столкновения пешехода с автомобилем на скорости 65 км/ч составляет 85%, 50 км/ч – 45%, 30 км/ч – 5%.
Риск травмирования пешеходов значительно снижается, если система обнаружения пешеходов используется совместно с системой защиты пешеходов или подушкой безопасности для пешеходов. Обнаружение пешеходов с помощью инфракрасных камер реализовано в системе ночного видения, но активное предупреждение столкновения в ней не предусмотрено.
Система обнаружения пешеходов показала свою эффективность в сложных условиях городского движения. Она позволяет одновременно отслеживать несколько пешеходов, движущихся различными курсами, различает движение пешеходов с зонтами во время дождя и др. Система неработоспособна ночью и в плохую погоду.
Система предупреждения о велосипедистах. Компания Jaguar Land Rover предложила инновационную систему предупреждения о велосипедистах. Система Bike Sense при потенциальной опасности столкновения с велосипедистом задействует зрение, слух и тактильные ощущения водителя. При этом воздействие на водителя производится на инстинктивном уровне, что позволяет быстрее перейти к действию.
Система предупреждения о велосипедистах, являясь электронной системой, включает входные устройства, блок управления и исполнительные устройства.
В качестве входных устройств выступают радары с широким радиусом действия и видеокамеры, установленные спереди и сзади автомобиля. Критерием распознавания велосипедиста является скорость его движения (до 15 км/ч) и типовое очертание. Входные устройства определяют велосипедиста на расстоянии 10 м.
Сигналы от входных устройств обрабатываются электронным блоком управления. В зависимости от конкретной дорожной ситуации активизируются определенные исполнительные устройства. Активизация исполнительных устройств производится при нахождении велосипедиста на расстоянии 5 м от автомобиля.
Исполнительными устройствами системы Bike Sense являются:
- звуковой сигнал тревоги;
- надувные валики в спинке водительского сидения;
- вибратор на педали акселератора;
- вибратор на внутренние ручки двери;
- светодиодная подсветка на внутренних элементах салона.
Для предупреждения об опасности используется звуковой сигнал велосипедного звонка. Такой сигнал лучше ассоциируется с велосипедистом. В зависимости от положения велосипедиста относительно автомобиля сигнал транслируется из левых или правых динамиков акустической системы.
В спинке водительского сидения оборудованы специальные надувные валики. В зависимости от положения велосипедиста относительно автомобиля активизируется левый или правый валик, нажимая, соответственно, на левое или правое плечо водителя.
Вибратор на педали акселератора срабатывает для предупреждения нежелательного трогания автомобиля с места. Вибратор на внутренней ручке двери активизируется, чтобы предупредить опасное открытие двери, которой можно травмировать движущегося велосипедиста.
На передних стойках кузова, верхней части приборной панели, внутренней обивке дверей установлена комбинированная светодиодная подсветка зеленого, желтого и красного цвета. Светодиоды определенного цвета задействуются в зависимости от степени опасности столкновения с велосипедистом (зеленый – безопасно, желтый – возможная опасность, красный – опасно).
В алгоритме работы системы предупреждения о велосипедистах предусмотрено три типичные ситуации, на которые предлагается определенный набор действий.
Приближение велосипедиста сзади движущегося автомобиля сигнал тревоги со стороны опасности;
надувной валик со стороны опасности;
светодиодная подсветка со стороны опасности.
Приближение велосипедиста (пешехода) в поперечном направлении впереди стоящего автомобиля перед пешеходным переходом сигнал тревоги со стороны опасности;
вибрация педали акселератора.
Приближение велосипедиста сзади стоящего автомобиля и намерение водителя или пассажиров выйти из автомобиля (открыть дверь) вибрация дверной ручки со стороны опасности;
светодиодная подсветка со стороны опасности.
Несмотря на оригинальность и значимость данной системы, она не будет иметь решающего значения для повышения безопасности велосипедистов. Для защиты велосипедистов требуется изменения законодательства в части дорожного движения и развития велосипедной инфраструктуры.
Система обнаружения крупных животных. Столкновение с крупными дикими животными является серьезной проблемой дорожного движения. Особенно остро данный вопрос стоит в северных европейских странах Швеции, Норвегии, Финляндии, а также в США и Канаде. Как показывает статистика, 6% всех столкновений составляют аварии с участием крупных диких животных. Можно представить последствия столкновения с взрослым лосем для пассажиров и транспортного средства. И чем выше скорость движения, тем серьезнее последствия аварии. Даже если водителю удалось уйти от столкновения с животным, удержать автомобиль на дороге и избежать аварии не всегда удается.
Шведская компания Volvo, первая из автопроизводителей, разработала систему обнаружения крупных животных и устанавливает ее на свои серийные автомобили. Система обнаружения крупных животных является дальнейшим развитием системы обнаружения пешеходов. Она использует те же аппаратные средства (видеокамера, радар) что и Pedestrian Detection System, а отличается только программным обеспечением, которое позволяет распознавать форму диких животных, характер их перемещения.
Система определяет крупных диких животных (лось, олень), а также домашних животных (лошадь, корова). Животных размером поменьше (косуля, кабан) система не определяет. Для обнаружения диких животных используется видеокамера и радар, которые дополняют друг друга. При обнаружении животного система предупреждает водителя сигналом. При необходимости производится автоматическое экстренное торможение автомобиля. Если столкновения с животным избежать не удается, снижение скорости существенно уменьшает последствия аварии.
Для обнаружения животных система использует датчики, которые располагаются на столбах вдоль дороги. Ранее в качестве таких датчиков использовался лидар, но по причине частых ложных срабатываний (мелкие животные, осадки, растительность) был заменен на радар.
Радар посылает сигнал во всех направлениях в радиусе 700м. По отраженному сигналу система судит о наличии и направлении движения животных. Когда лось или олень приближаются к дороге, срабатывают сигнальные огни желтого цвета. Мигание огней происходит в течение трех минут, правда животное за это время может далеко уйти от дороги и не представлять опасность. Питание системы производится от солнечных батарей и резервных аккумуляторов.
Как заявляет производитель, система LADS снижает опасность столкновения с большими животными до 80%.
Круиз-контроль. Круиз-контроль (англ. Cruise control, нем. Tempomat) — устройство, поддерживающее постоянную скорость автомобиля на дорогах с гладким или переменным рельефом, автоматически прибавляя её при снижении скорости движения и уменьшая скорость при её увеличении, к примеру, на спусках, без участия водителя. Удобен в дальних дорогах, когда утомительно удерживать на большом протяжении времени педаль газа в одном и том же положении. Устанавливается как на автомобили с автоматической коробкой передач, так и на автомобили с механикой.
Различают пассивный и активный круиз-контроль.
Пассивный круиз-контроль поддерживает постоянную скорость транспортного средства, начиная, как правило, с движения в 30-40 км/ч. Водитель может установить любую скорость до некоторого верхнего предела, который обусловливается максимально допустимой частотой вращения коленчатого вала двигателя.
По принципу действия все системы круиз-контроля похожи. В состав системы входит электронный блок управления, исполнительный механизм, датчик скорости, выключатель и регулятор. Включение системы обычно осуществляется двумя переключателями. Один только включает или выключает круиз-контроль, с помощью второго можно регулировать и изменять скорость движения до желаемой величины (рис. 16.33).
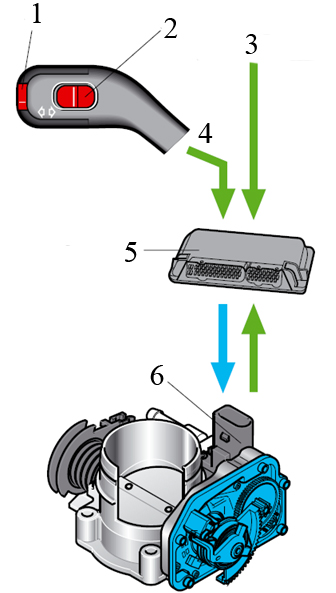
Датчик скорости может быть встроен в приводной механизм спидометра. Информация от этого датчика поступает в блок управления, где фактическое значение скорости сравнивается с заданным, после чего формируется сигнал исполнительному механизму.
Исполнительный механизм управляет дроссельной заслонкой, обеспечивающей необходимую частоту вращения коленчатого вала, для поддержания заданной скорости. Привод механизма в более ранних конструкциях автомобилей осуществлялся за счет вакуумного привода. На современных автомобилях используются механизмы с электрическими исполнительными двигателями, описанными выше.
Скорость движения поддерживается независимо от аэродинамического сопротивления. При торможении скорость автомобиля уменьшается, но после выключения тормозов система восстанавливает установленную скорость. Когда система включена, заданную скорость можно также изменить с шагом 1…5 км/ч, нажимая кнопку и не трогая педаль акселератора.
Активный круиз-контроль или (система автоматического регулирования дистанции (САРД)) похож на обычный круиз-контроль тем, что он держит автомобиль на заранее установленной скорости. Однако, в отличие от обычного, эта система может автоматически настроить скорость в целях поддержания надлежащего расстояния между транспортными средствами в той же полосе движения.
Известными системами адаптивного круиз-контроля являются:
Preview Distance Control от Mitsubishi;
Radar Cruise Control от Toyota;
Distronic (Distronic Plus) от Mercedes-Benz;
Active Cruise Control от BMW;
Adaptive Cruise Control от Volkswagen, Audi, Honda.
САРД дополняет традиционную систему регулирования скорости круиз-контроля автомобиля, которая автоматически поддерживает ее на заданном водителем уровне, повышая комфортность управления автомобилем. Кроме этого САРД обеспечивает регулирование скорости автомобиля в соответствии с замедлением движущегося впереди него транспортного средства.
Система автоматического регулирования дистанции относится к вспомогательным устройствам, предназначенным для повышения комфортности управления автомобилем. Она способствует снижению психической нагрузки на водителя, повышая тем самым активную безопасность автомобиля.
Основные компоненты системы показаны на рис. 16.34.
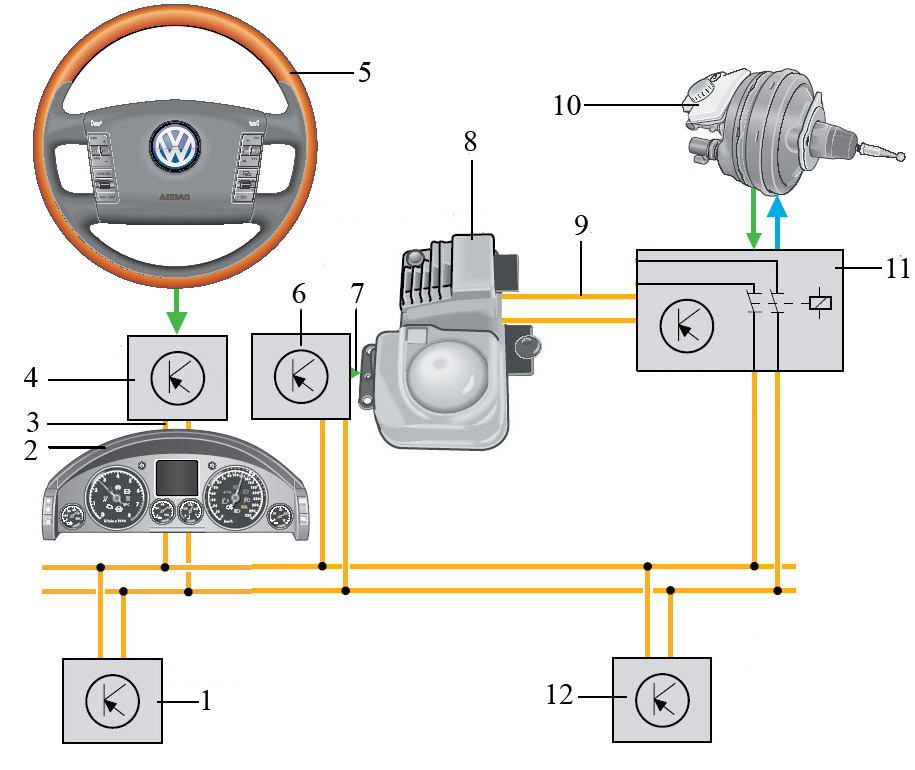
Управление САРД осуществляется в основном посредством кнопок на многофункциональном рулевом колесе 5 и отчасти посредством педалей акселератора и тормоза, как и при изменении скорости автомобиля. Кнопки на рулевом колесе соединены с блоком управления электронной системой рулевой колонки 4, который передает сигналы на комбинацию приборов через шину данных 3 CAN, обслуживающую систему “Комфорт”.
В средней части щитка приборов находится дисплей, на котором выводится информация о работоспособности САРД, параметры, заданные водителем, предупреждающие указания, включенной или выключенной системе, изображение автомобиля, если впереди находится транспортное средство, время преодоления дистанции до движущегося впереди транспортного средства и др. Информация может сопровождаться звуковыми сигналами.
Электронный блок управления принимает сигналы от датчиков расстояния, а также входную информацию от других систем, с помощью которых определяется:
- скорость и дистанция до впереди идущего автомобиля;
- скорость управляемого автомобиля;
- угол поворота рулевого колеса;
- боковое ускорение;
- радиус кривой.
При снижении скорости автомобиля до 30 км/ч и при превышении 180 км/ч САРД автоматически отключается. Она отключается также при вводе в действие тормозной системы в результате активизации системы стабилизации, противобуксовочной или антиблокировочной системы.
Для измерения дистанции в САРД предусмотрен радиолокационный датчик (радар), работающий в диапазоне миллиметровых волн, устройство которого описано выше.
Принцип работы. Движение с постоянной скоростью (рис. 16.35, а). В поле зрения датчика адаптивного круиз-контроля другие автомобили отсутствуют. Система не предпринимает экстренного торможения, если она, например, обнаружит стоящие впереди (в хвосте пробки) автомобили. Система поддерживает заданную водителем скорость.
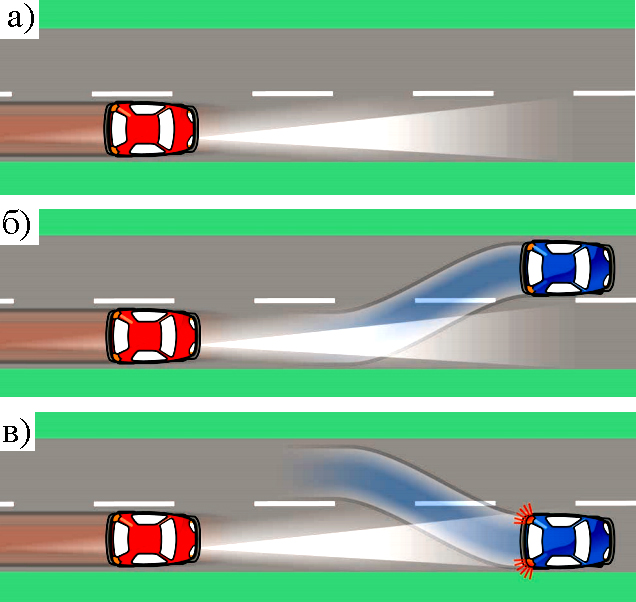
Ускорение (рис. 16.35, б). Расстояние до идущего впереди автомобиля будет больше, чем заданное водителем, так как этот автомобиль ускоряется или перестраивается в другой ряд, освобождая дорогу. Автомобиль с адаптивным круиз-контролем вновь разгоняется до выбранной водителем скорости.
Замедление (рис. 16.35, в). Если дистанция становится меньше заданного водителем значения, потому что идущий впереди автомобиль замедляется или медленно едущий автомобиль перестраивается из соседнего ряда, автомобиль замедляется, так чтобы соблюдалась заданная дистанция. Такое замедление может достигаться за счёт отдачи соответствующих команд системе управления двигателя. Если замедления путём снижения мощности двигателя оказывается недостаточно, задействуется тормозная система.
Необходимое срабатывание тормозов достигается с помощью гидравлического блока с насосом обратной подачи. Переключающий клапан в гидравлическом блоке закрывается, а клапан высокого давления открывается. На насос обратной подачи подаётся управляющий сигнал, и насос начинает работать. Таким образом создаётся тормозное давление в контурах колёс.
Адаптивный круиз-контроль, устанавливаемый в модели Touareg, может затормозить автомобиль вплоть до полной остановки, если этого потребует дорожная обстановка.
С целью повышения безопасности автомобиля отдельные конструкции адаптивного круиз-контроля могут быть дополнены системами превентивной безопасности, экстренного торможения, GPS-навигации.
Адаптивный круиз контроль служит технической основой разрабатываемых систем автоматического управления автомобилем.
Система контроля усталости водителя призвана обнаружить наступление усталости водителя и предупредить сон за рулем. Если система обнаружит, что глаза водителя закрыты больше определенного времени или лицо водителя занимает в поле зрения видеокамеры нестандартное положение, тогда сначала водителя предупредит об опасности вибрация сиденья. В случае дальнейшего нестандартного поведения водителя начинает звучать звуковой сигнал.
Система контроля усталости водителя призвана обнаружить наступление усталости водителя и предупредить сон за рулем. Примером системы контроля усталости водителя является система DAS (Driver Attention System), разработанная фирмой Siemens VDO. Миниатюрная инфракрасная видеокамера сканирует лицо водителя в инфракрасном диапазоне и регистрирует частоту моргания глаз водителя и направление его взгляда (рис. 16.36). Информация поступает в компьютер, где после обработки по алгоритму делается вывод о степени усталости человека за рулем.
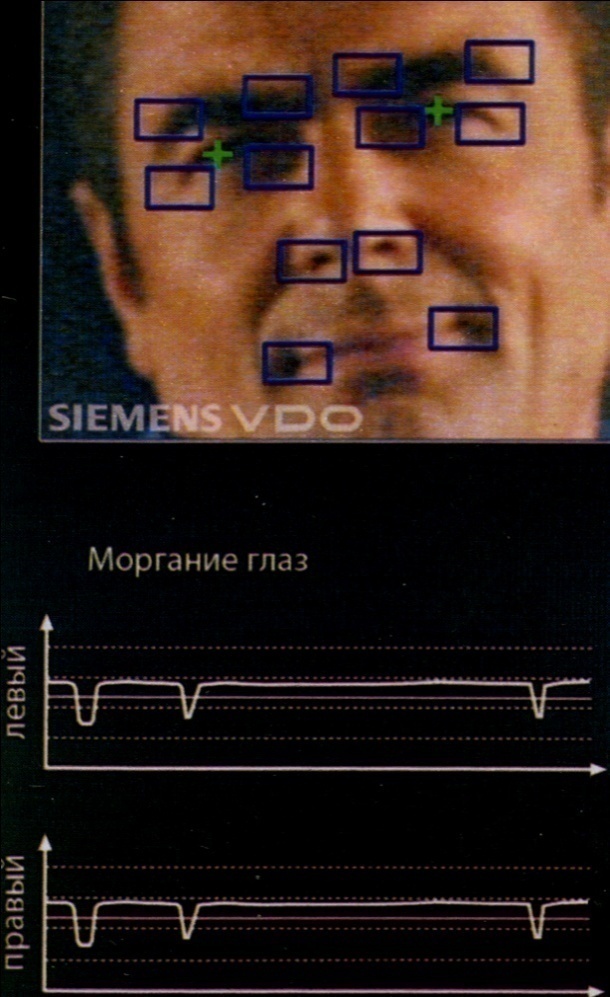
Компьютер выделяет из картинки глаза и вычисляет не только моргания век, но и направление взгляда, превращая их в последовательность импульсов.
Дальнейшие разработки направлены на плавную остановку автомобиля и включение аварийного сигнала. Однако прежде надо решить целый ряд законодательных вопросов, связанных с внезапной остановкой автомобиля – возможно, посередине полосы движения, что само по себе тоже небезопасно для остальных участников движения.
Другой аналогичной является система, в которой видеокамера, расположенная за зеркалом заднего вида, смотрит не на водителя, а на дорогу. Состояние водителя в этом случае оценивается по характерным изменениям в манере вождения, при этом определяется влияние рассеянности или усталости на управление автомобилем, например, если водитель засыпает и автомобиль без включения сигнала поворота начинает смещаться из своей полосы движения, или резко изменяется скоростной режим.
Как только система обнаружит нестандартное поведение водителя – включается звуковой сигнал предупреждения и может загораться информация на приборной доске в виде чашечки дымящего кофе.
Другим направлением развития систем контроля является оснащение транспортных средств биометрическими датчиками, с помощью которых можно следить за важными для здоровья показателями (пульс, частота дыхания, проводимость кожи и др.).
В работе системы оценки нагрузки водителя используются следующие биометрические датчики:
пьезоэлектрический датчик в ремне безопасности для мониторинга частоты дыхания;
проводящие накладки на ободе рулевого колеса для измерения пульса;
инфракрасные датчики на ободе рулевого колеса для измерения температуры ладоней;
инфракрасный датчик за рулевым колесом, контролирующий температуру лица.
Датчик дождя и освещенности предназначен для того, чтобы при опознании влаги на стекле включать стеклоочиститель в зависимости от количества осадков с нулевого положения до максимального цикла очищения, или включать фары в зависимости от условий освещения.
Датчик дождя и освещенности устанавливается на ветровом стекле, например, между обеими щетками в наибольшем по высоте, среднем положении в зоне перекрытия стеклоочистителей (рис. 16.37).
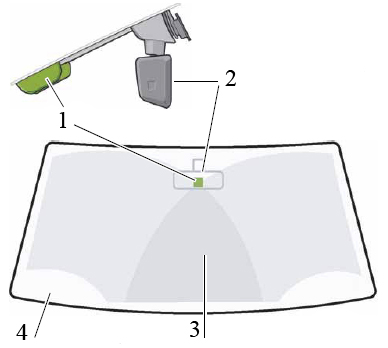
Датчик состоит из комбинации светочувствительных элементов и светодиода (рис. 16.38). Все части смонтированы на плате в корпусе датчика. Оптический элемент перекрывает корпус датчика и ветровое стекло. Задачей оптического элемента является фокусирование и выравнивание исходящего и входящего света. Весь датчик прикреплен к ветровому стеклу при помощи клеящей фольги. Для распознавания дождя используются светодиод 6 и фотодиод 8.
Принцип работы датчика дождя состоит в том, что свет, исходящий от светодиода, частично отражается на поверхности стекла и, сфокусировавшись через оптический элемент, попадает на фотодиод. Если на улице сухо, весь свет отражается обратно и попадает на фотоприемник (так рассчитана оптическая система). Поскольку луч модулирован импульсами, то на посторонний свет датчик не среагирует, как телевизор, «не видящий» чужой пульт. Степень отражения света от диода и таким образом количество света, который попадает на фотодиод, изменяется, если стекло покрыто каплями воды или имеет водяную пленку. Чем сильнее увлажнение, тем меньше отражение преломленного света. На основании этого для определения количества осадков используется выходной сигнал фотодиода. Это фиксируется сенсором, и контроллер рассчитывает подходящий режим работы стеклоочистителя. Время реагирования на распознавание дождя, т.е. время, затраченное между распознаванием осадков и подачей выходного сигнала на стеклоочиститель, составляет менее 20 мс.
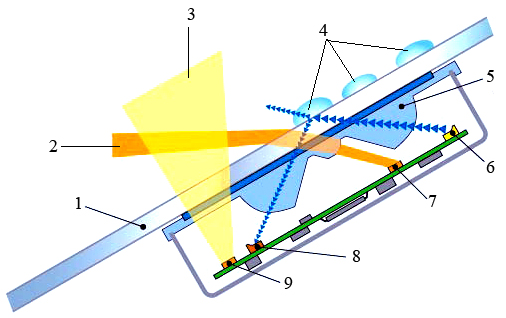
Для распознавания света применяются дистанционный фотодиод 7 и датчик внешнего освещения 9. Датчик 9 охватывает световые условия непосредственного пространственно вокруг автомобиля и служит для автоматического включения фар, а дистанционный датчик 7 – световые условия на расстоянии до трех длин автомобиля по направлению движения.
Система распознает в целом уменьшение или увеличение освещенности и включает или выключает свет фар. Из разности сигналов обоих датчиков система, например, может определить, что автомобиль въезжает в туннель (рис. 16.39) и, таким образом, свет фар включается не позднее въезда в туннель. Система действует таким образом, что свет отключается лишь тогда, когда датчик света определит достаточное значение освещенности. Если наряду с распознаванием света активно также распознавание дождя, то система включает фары и при сильных осадках.
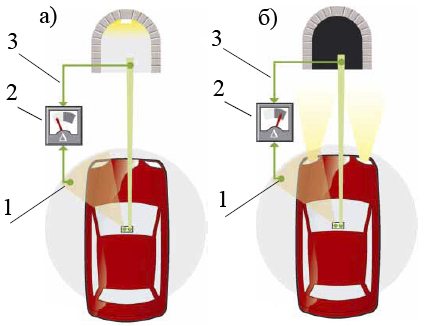
Проекционный дисплей — это система индикации информации различных систем автомобиля, проецирующая эту информацию на ветровое стекло, в поле зрения водителя. Для считывания этой информации водителю практически не нужно менять направление взгляда. По-английски такие дисплеи часто называют head-up display (голова поднята вверх), подчёркивая тот факт, что водителю не нужно наклонять голову.
Использование специального ветрового стекла и соответствующая схема проекции создают у водителя впечатление, что индикация проекционного дисплея находится не на ветровом стекле, а за ним, на достаточно удобном удалении, примерно в 2…2,5 м от водителя, как бы висящая над капотом автомобиля (рис. 16.40).
Работа системы основана на принципе распознавания изображений. Камера, находящаяся в передней части автомобиля, воспринимает изображение дороги и это изображение анализируется специальной программой.
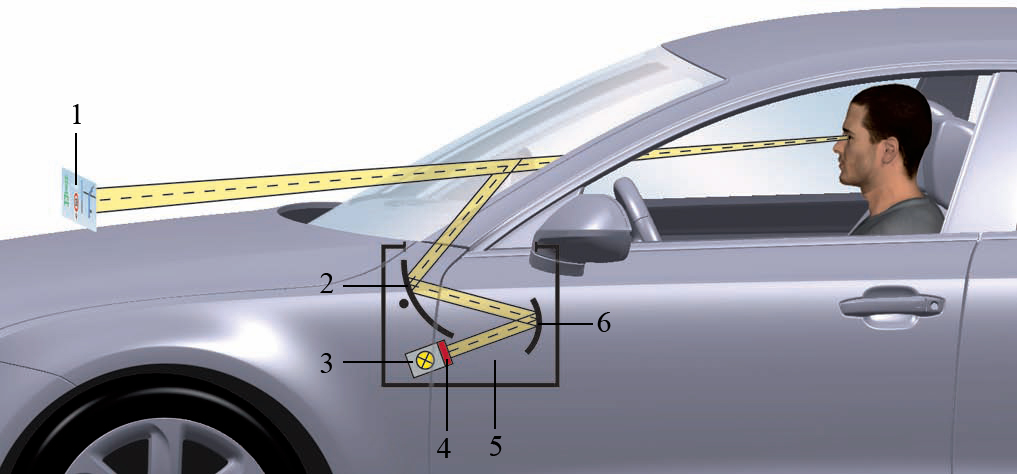
Источником изображения в проекционном дисплее 4 служит прозрачная TFT-матрица высокого разрешения, состоящая из тонкоплёночных транзисторов. Матрица просвечивается сильным источником света 3 (15 светодиодов), аналогично тому, как это происходит в диапроекторе. Свет, прошедший через матрицу, направляется двумя зеркалами 2 и 6 на ветровое стекло. Зеркало 6 сделано подвижным и с его помощью можно изменять высоту видимого положения дисплея. Это позволяет отрегулировать положение изображения в зависимости от положения сиденья или роста водителя. Кроме того, форма зеркал подобрана так, что они компенсируют искажения изображения, возникающие вследствие изогнутой формы ветрового стекла.
Яркость свечения видимого изображения непрерывно адаптируется к яркости окружающего света. Для этого блок управления 5 получает данные об яркости окружения от датчика дождя и освещённости. Водитель также имеет возможность регулировать яркость изображения дисплея.
Ветровое стекло является важной составной частью оптической системы проекционного дисплея. Проецируемое изображение отражается также и от ветрового стекла, которое в этом случае, по сути, играет роль третьего, полупрозрачного зеркала, что предъявляет очень высокие требования к геометрическим параметрам ветрового стекла. Использование обычного ветрового стекла приводило бы к раздражающему раздвоению изображения. Поэтому в автомобилях с проекционным дисплеем устанавливается специальное ветровое стекло (рис. 16.41).
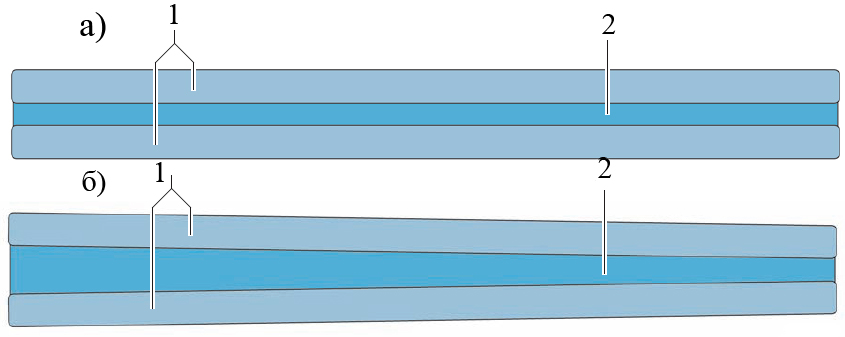
Ветровое стекло для автомобилей с проекционным дисплеем отличается от обычного тем, что полимерная плёнка, находящаяся между наружным и внутренним слоями стекла, имеет в нём не постоянную толщину, а выполнена слегка клинообразной. Наружная и внутренняя поверхности ветрового стекла оказываются не совсем параллельными (в направлении к верху толщина стекла несколько увеличивается) и два изображения, образующихся в результате отражения света от каждой из этих двух поверхностей, смещаются по отношению друг к другу так, что сливаются в одно.
На проекционном дисплее могут отображаться следующие индикации (рис. 16.42):
текущая скорость автомобиля;
данные навигационной системы;
включение круиз-контроля или ассистента движения по полосе;
отображение действующих знаков ограничения скорости с дополнительными табличками;
красные предупреждающие пиктограммы (например, о необходимости доливки масла);
предупреждение ассистента ночного видения и др.

Темнеющие зеркала заднего вида. Исследования показывают, что при ослеплении ярким светом через зеркало заднего вида наблюдается кратковременная потеря зрения и увеличивается время реакции водителя. В связи с этим, находят все более широкое распространение специальные темнеющие зеркала заднего вида, не допускающие ослепление водителей светом фар сзади движущегося транспортного средства.
Ранние варианты зеркал (рис. 16.43, а), изменяющих обратный световой поток были устроены аналогично жидкокристаллическим дисплеям калькуляторов: между двумя стеклянными пластинами заключен тонкий слой жидкости, которая меняет коэффициент поглощения света под воздействием приложенного электрического напряжения. Недостатком таких зеркал являлось уменьшение быстродействие при низких температурах и для устранения данного явления необходим подогрев, что усложняет конструкцию.
Более современные варианты, использует эффект обратимого изменения светопропускания (рис. 16.43, б). Его демонстрируют пленки окислов ряда металлов, в частности, вольфрам, которые наносят непосредственно на стекло. Зеркало получается однослойным, не боится холода и к тому же потребляет ток лишь в моменты переключения. Такие зеркала получили название электрохромных и сегодня применяются на автомобилях многих марок.
Электрохромное зеркало состоит из стекла 1 с нанесенным на него прозрачным электродом 2 из окиси индия, нанопленки оксида вольфрама 3, слоя твердого электролита 4 и отражающего металлического покрытия-электрода 5. Под воздействием электрического напряжения почти прозрачный оксид превращается в окрашенную вольфрамовую бронзу и ослабляет дважды проходящий через него свет, а затем вновь обретает прозрачность.
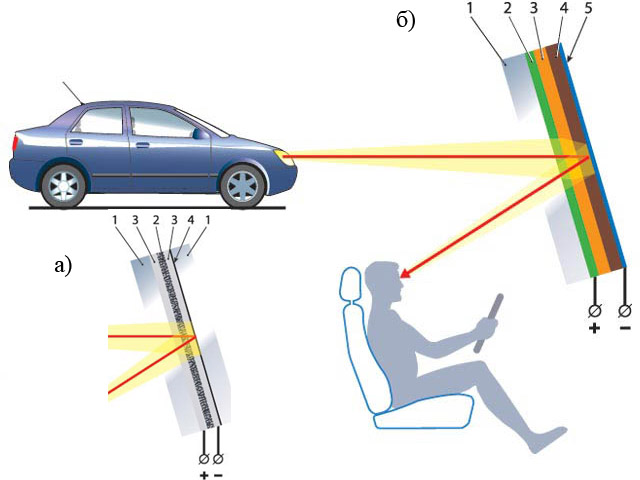
Впоследствии появились автоматически темнеющие зеркала NVS (Night Vision Safety) (рис. 16.44). Прозрачностью стекла командует контроллер, сравнивающий сигналы от двух фотодатчиков. Первый, направленный вперед, измеряет общую освещенность, второй, глядя назад, ловит лучи фар, едущих за вами автомобилей. Слишком большая разница между показаниями датчиков (спереди темно, сзади ярко) говорит об опасности ослепления. По командам датчиков выдается команда затемнить стекла зеркал.
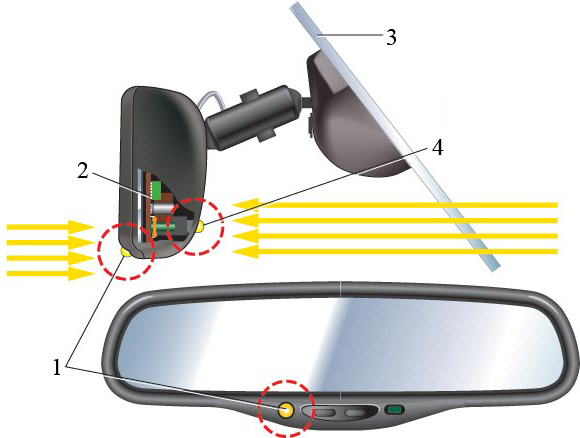
Система обеспечения безопасности при плохой видимости LIDAR (Light Detection and Ranging). При движении автомобиля во время тумана, дождя и снегопада, не видя перед собой останавливающегося автомобиля, водитель может не успеть своевременно нажать на педаль тормоза и остановиться. Для решения данной проблемы компания Siemens VDO усовершенствовала свою более раннюю разработку – адаптивный круиз-контроль, научив его распознавать сработавшие стоп-сигналы у впереди идущего автомобиля, а также эффективно работать в туман, дождь и снег. Добились этого благодаря внедрению в конструкцию системы датчика LIDAR.
Конструктивно датчик LIDAR состоит из источника инфракрасного излучения, фотодиода, выполняющего функцию приемника отраженных лучей невидимого инфракрасного света, и электроники, обрабатывающей информацию.
Лазерный луч проходит через дождь, снегопад или туман расстояние до 250 м. Датчик непрерывно контролирует время распространения излучаемых и отраженных от препятствия инфракрасных лучей. Имея в распоряжении эту информацию, ЭБУ вычисляет изменение расстояния до впереди идущего транспортного средства. Датчик LIDAR также способен выявлять частицы воды (тумана, дождя). На основании чего ЭБУ делает вывод о плохой видимости и принимает решение о снижении скорости, для чего снижается частота вращения коленчатого вала двигателя и включается привод тормозных механизмов, для того чтобы сохранить безопасный интервал. Усовершенствованная система также отличает транспортные средства от объектов недвижимости.
Система слежения за «мёртвыми зонами» (Side Assist). Эта система следит за мертвыми зонами и обстановкой вокруг автомобиля и предупреждает водителя если тот не заметил помехи в зеркало заднего вида при необходимости смены ряда.
Два радарных датчика на 24 гигагерца в заднем бампере контролируют область рядом с сзади автомобиля, чтобы предупредить водителя (дополнительно к изображению в зеркале заднего обзора) о любых приближающихся транспортных средств. Диапазон дальности датчиков — до 50 метров.
Если система идентифицирует другое транспортное средство, она сообщает водителю через свет светодиода в наружном зеркале. Система дает предупреждение мигающим светодиодом, если водитель активизировал указатель поворота в подготовке к изменению ряда, но пропустил другое транспортное средство в смежном ряду.
Персональные алкотестеры. Интересную новинку предложила шведская автомобильная компания Volvo — в качестве опции для новых моделей Volvo S80, V70 и XC70 уже с начала 2008 года предлагалась система Alcoguard, которая по сути является алкотестером и призывает водителя принять трезвое решение и отказаться от управления автомобилем в нетрезвом состоянии. В конструкции Alcoguard, кстати, используется технология топливных элементов, которая пока обходится дороже, но результат ее применения оказывается гораздо лучше традиционных химических или полупроводниковых тестеров. В отличие от полупроводниковых систем, технология топливных элементов способна реагировать исключительно на этиловый спирт, а не на какие-либо другие вещества. В этом устройстве молекулы этилового спирта проходят через чувствительную мембрану, в результате вырабатывается ток, который и измеряется системой. Чем больше будет этот ток, тем выше содержание алкоголя в дыхании водителя.
Таким образом, прежде чем запустить двигатель автомобиля, водитель должен будет подуть в беспроводной переносной блок, который представляет собой устройство размером с пульт дистанционного управления и находится в специальной нише за центральной консолью, где постоянно подзаряжается. В этом устройстве проводится анализ дыхания водителя, а результат анализа по радиочастоте передается в электронную систему управления автомобилем. Если содержание алкоголя в крови превышает 0,2 г/л, то пуск двигателя будет заблокирован.
Информационный дисплей автомобиля выводит сообщения, помогающие водителю использовать устройство. Например, водитель может узнать, каким оказался результат проверки — положительным или отрицательным, и какое значение получилось, а кроме того, система может потребовать от водителя дуть в переносное устройство дольше. Результаты хранятся в памяти в течение 30 мин после выключения двигателя, поэтому водителю не придется повторять проверку после каждой короткой остановки и не удастся обмануть систему «перезагрузкой». Ограничение в пределах 0,2 г/л было установлено в соответствии с требованиями шведского законодательства. Если в других странах приняты иные нормы, то специалисты Volvo могут внести необходимые изменения в параметры системы. Калибровка и замена аккумуляторных батарей в переносном устройстве производятся в процессе планового обслуживания автомобиля. Если новый владелец автомобиля не пожелает использовать эту систему, она может быть отключена и снята с автомобиля дилером.
Кроме того, переносное устройство подключено по беспроводной связи, поэтому водитель может вынуть его из автомобиля, но несмотря на то, что устройство всегда может произвести точное измерение содержания алкоголя в крови, результаты этого измерения можно получить только в том случае, если устройство находится на расстоянии не более десяти метров от автомобиля. При комнатной температуре устройство нагревается в течение пяти секунд, поэтому в целях сокращения времени ожидания для проверки система включает функцию подогрева сразу после разблокировки дверных замков автомобиля.
Компания ожидает, что приобретать новое устройство Alcoguard будут в основном корпоративные парки, операторы такси, государственные учреждения и муниципалитеты, однако благодаря удобству применения этого аппарата не исключено, что оно будет востребовано и частными владельцами автомобилей.