При прямолинейном движении во время торможения автомобиля на его колесо действуют разные силы: вес автомобиля, тормозная сила и боковая сила (рис. 13.13). Величина сил зависит от множества факторов, таких как скорость движения автомобиля, размеры колес, состояние и конструкция шин и дорожного полотна, конструкции тормозной системы и ее технического состояния.
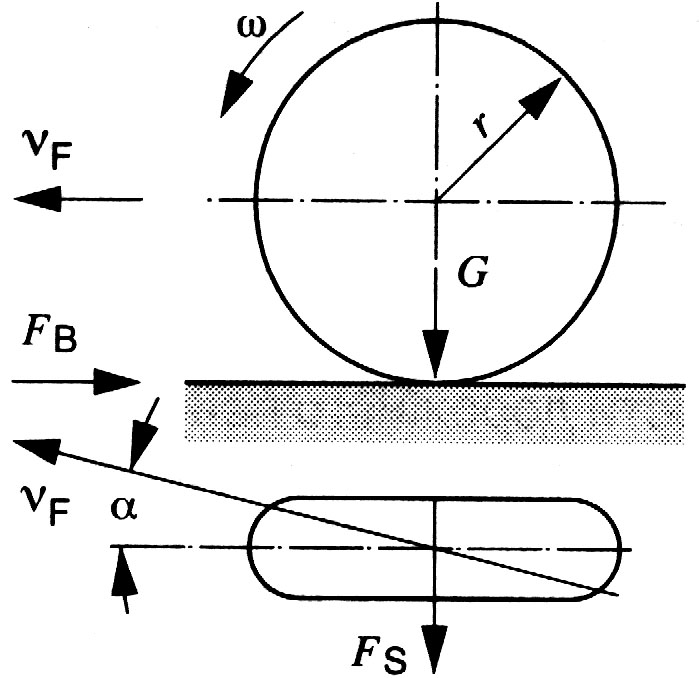
Во время прямолинейного движения автомобиля с постоянной скоростью разницы в скоростях вращения колес не возникает. При этом не возникает также разницы между приведенной скоростью движения автомобиля νF и согласованной с ней усредненной скоростью νR вращения колес, т.е. νF = νR. Под усредненной скоростью вращения колес понимается величина
νR = (νR1+ νR2 + νR3 + νR4) /4,
где νR1…νR4— скорости вращения каждого колеса в отдельности.
Но как только начинается процесс интенсивного торможения, приведенная скорость автомобиля νF, начинает превышать усредненную скорость νR вращения колес, так как кузов «обгоняет» колеса под действием силы инерции массы автомобиля, т.е. νF>νR.
В такой ситуации между колесами и дорогой возникает явление равномерного умеренного скольжения. Это скольжение является рабочим параметром тормозной системы и определяется как
λ = (νF — νR)/ νF•100%.
Физически рабочее скольжение в отличие от аварийного юза реализуется за счет прогибания протектора колесных шин, сдвига мелких фракций на поверхности дороги, и за счет амортизации автомобильной подвески. Эти факторы удерживают автомобиль от юза и отображают полезную суть рабочего скольжения колеса при его торможении. Ясно, что при этом замедление вращения колеса происходит постепенно и управляемо, а не мгновенно, как при блокировке.
Величина λ названа коэффициентом скольжения и измеряется в процентах. Если λ = 0%, то колеса вращаются свободно, без воздействия на них дорожного сопротивления трению. Коэффициент скольжения λ = 100% соответствует юзу колеса, когда оно переходит в заблокированное состояние. При этом значительно снижаются тормозная эффективность, устойчивость и управляемость автомобиля при торможении.
Основной задачей АБС является поддерживание в процессе торможения относительного скольжения колес в узких пределах вблизи λкp. В этом случае обеспечиваются оптимальные характеристики торможения. Для этой цели необходимо автоматически регулировать в процессе торможения подводимый к колесам тормозной момент.
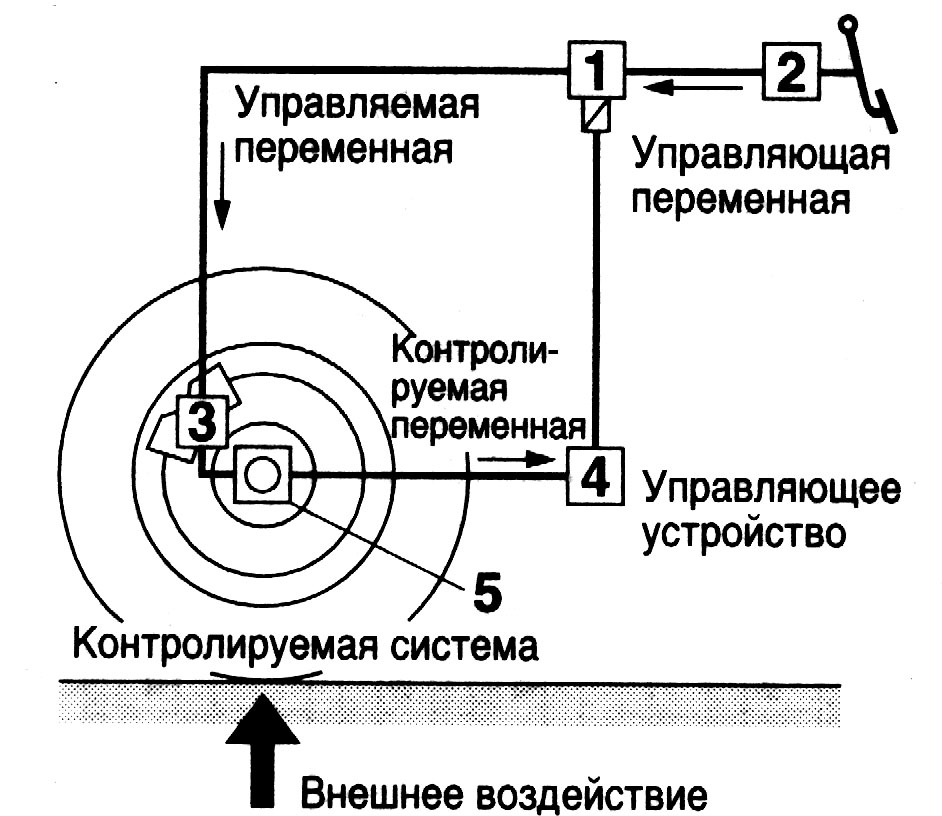
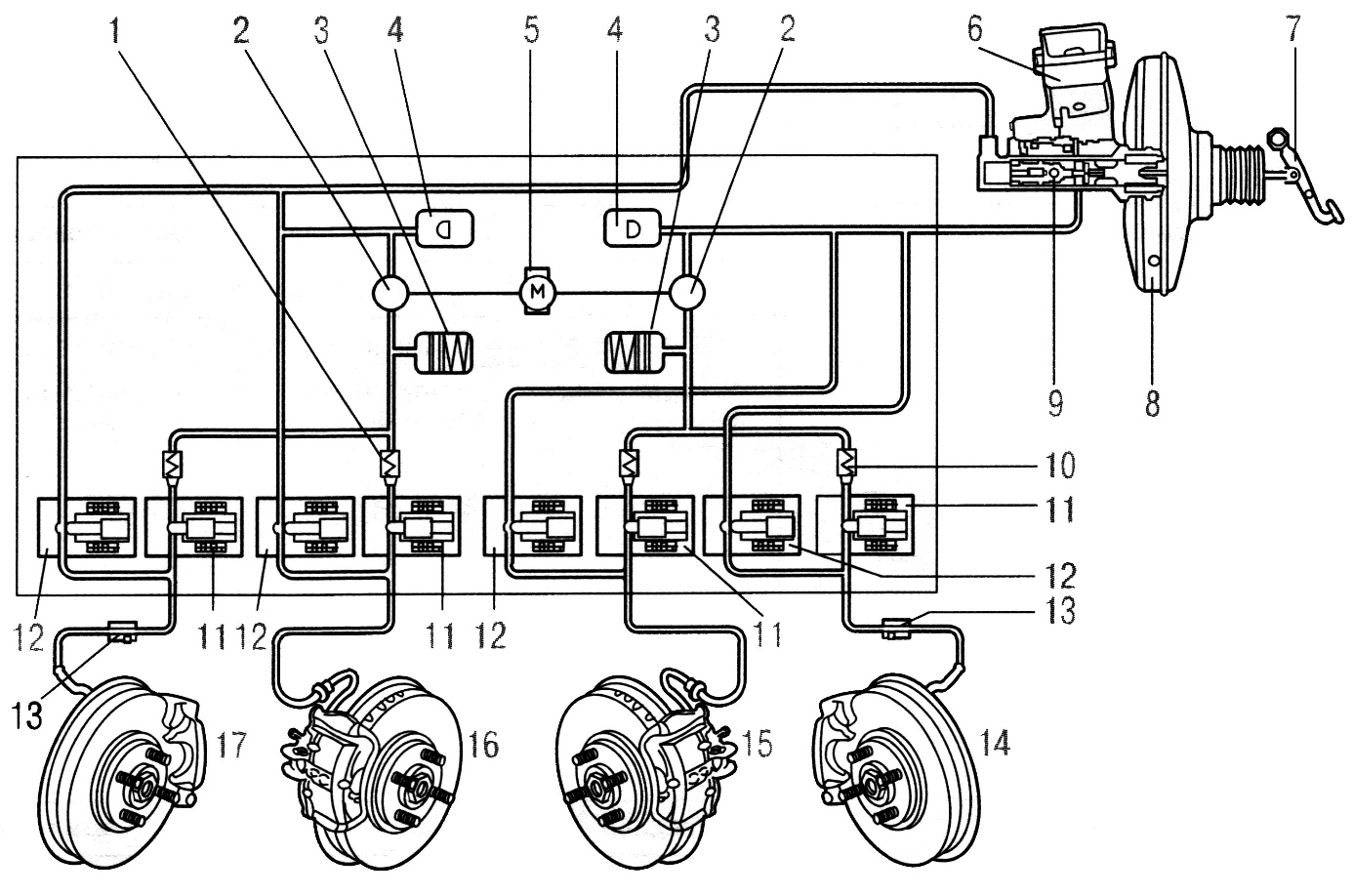
Появилось много разнообразных конструкций АБС, которые решают задачу автоматического регулирования тормозного момента. Независимо от конструкции, любая АБС (рис. 13.14) должна включать следующие элементы:
датчики, функцией которых является выдача информации, в зависимости от принятой системы регулирования, об угловой скорости колеса, давлении рабочего тела в тормозном приводе, замедлении автомобиля и др.;
блок управления, обычно электронный, куда поступает информация от датчиков, который после логической обработки поступившей информации дает команду исполнительным механизмам;
исполнительные механизмы (модуляторы давления), которые в зависимости от поступившей из блока управления команды снижают, повышают или удерживают на постоянном уровне давление в тормозном приводе колес.
Процесс регулирования с помощью АБС торможения колеса – циклический. Связано это с инерционностью самого колеса, привода, а также элементов АБС. Качество регулирования оценивается по тому, насколько АБС обеспечивает скольжение тормозящего колеса в заданных пределах. При большом размахе циклических колебаний давления нарушается комфортабельность при торможении «дергание», а элементы автомобиля испытывают дополнительные нагрузки. Качество работы АБС зависит от принятого принципа регулирования, а также от быстродействия системы в целом. Быстродействие определяет циклическую частоту изменения тормозного момента. Важным свойством АБС должна быть способность приспосабливаться к изменению условий торможения (адаптивность) и, в первую очередь, к изменению коэффициента сцепления в процессе торможения.
В антиблокировочной тормозной системе, обеспечивающей управление процессом торможения всеми колесами раздельно друг от друга, анализируется частота вращения каждого колеса в отдельности. В процессе торможения, когда увеличивается давление в рабочих колесных цилиндрах (камерах), частота вращения колес уменьшается. При ее снижении до значения, граничащего с блокировкой (точнее, до 20…25 %-го проскальзывания), давление в рабочих цилиндрах понижают, и колесо начинает разгоняться. После этого давление вновь повышают, вызывая уменьшение частоты вращения. Затем процесс повторяется.
За каждый цикл повышения-снижения давления в тормозной системе угловая скорость колес, а, следовательно, и линейная скорость автомобиля понижаются с наибольшей эффективностью определяемой сцепными силами колес с дорогой.
Процесс работы антиблокировочной системы (АБС) может проходить по двух- или трехфазовому циклу. При двухфазовом цикле: первая фаза – нарастание давления, вторая фаза – сброс давления. При трехфазовом цикле: первая фаза – нарастание давления; вторая фаза – сброс давления; третья фаза – поддержание давления на постоянном уровне.
В настоящее время более распространены АБС, работающие по трехфазовому циклу. Примером такой системы является довольно распространенная система АБС 2S фирмы Бош.
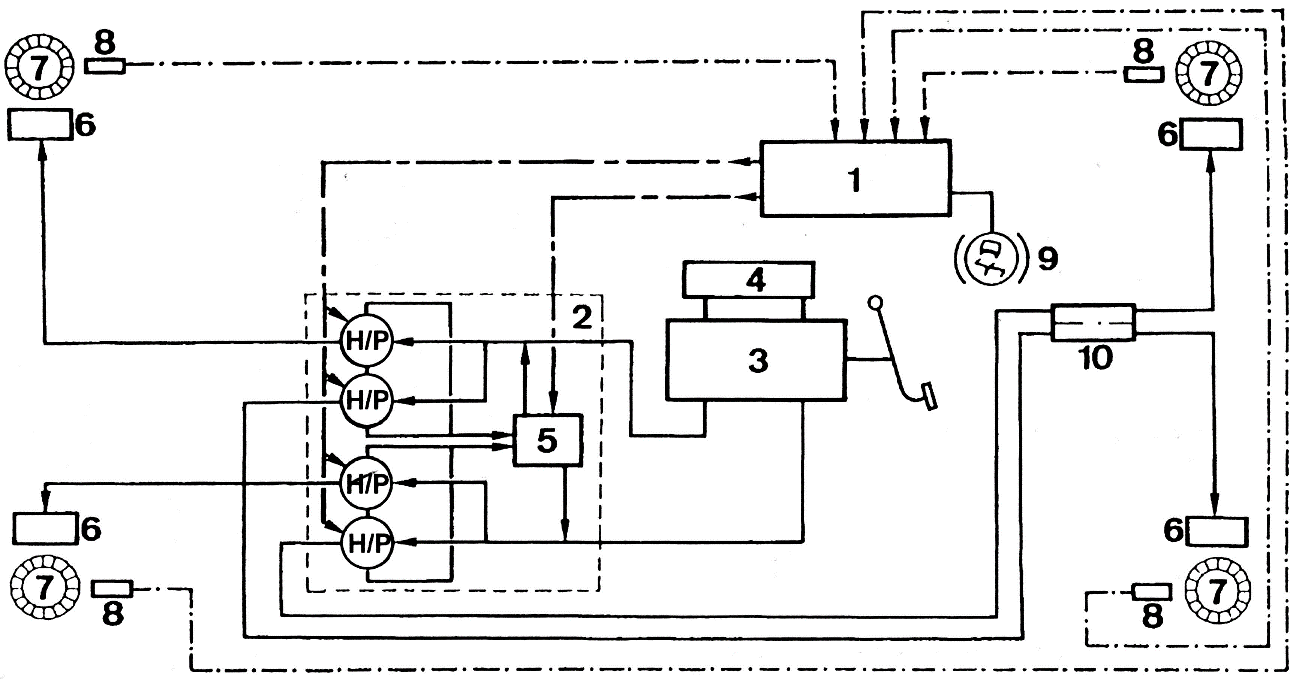
Эта система (рис. 13.15) встраивается в качестве дополнительной в обычную тормозную систему. Между главным тормозным цилиндром и колесными цилиндрами устанавливается нагнетательные (Н) и разгрузочные (Р) электромагнитные клапаны, которые либо поддерживает на постоянном уровне, либо снижают давление в приводах колес или в контурах. Электромагнитные клапаны приводятся в действие блоком управления, обрабатывающим информацию, поступающую от четырех колесных датчиков.
Блок управления, куда непрерывно поступают данные о скорости вращения каждого колеса и ее изменениях, определяет момент возникновения блокировки, затем, при необходимости, производит сброс давления, включает гидронасос, который возвращает часть тормозной жидкости обратно в питательный бачок главного цилиндра.
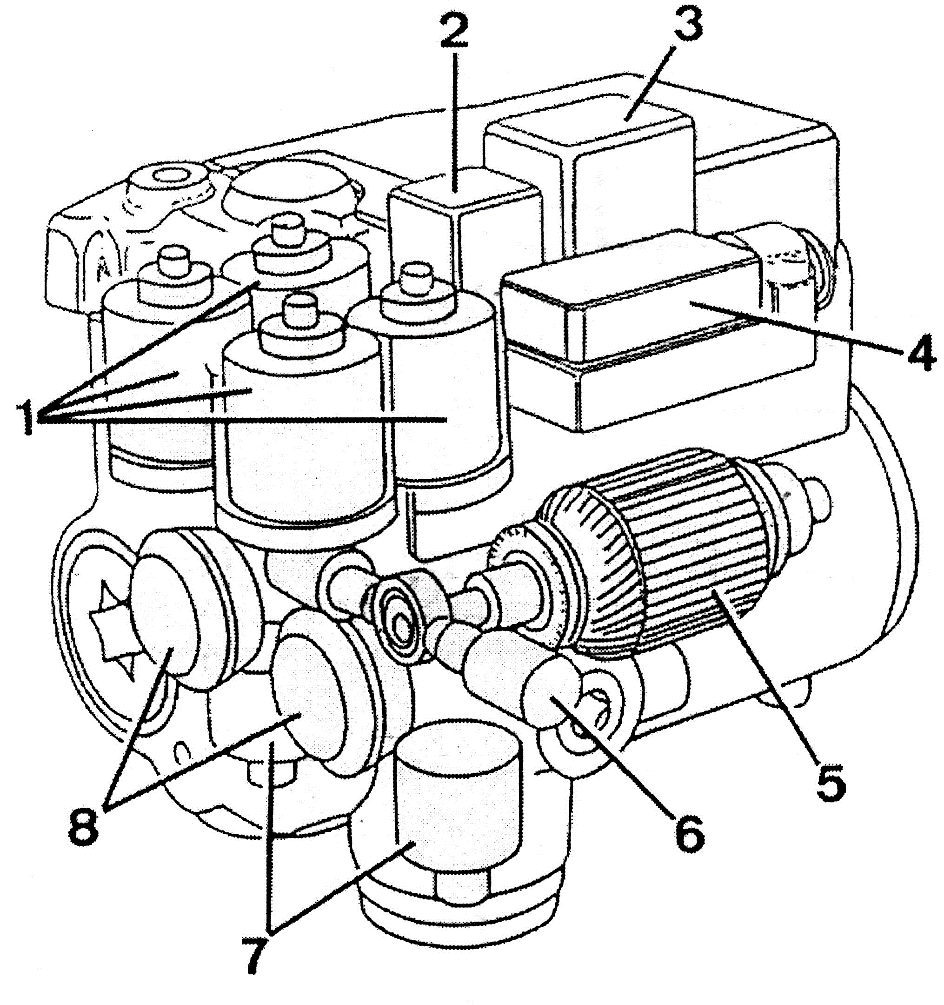
В модуляторе АБС (рис. 13.16) скомпонованы электромагнитные клапаны, гидронасос с аккумуляторами давления жидкости, реле электромагнитных клапанов и реле гидронасоса.
Гидронасосы обратной подачи электрогидравлического модулятора могут быть как одноступенчатыми, так и двухступенчатыми (рис. 13.17).
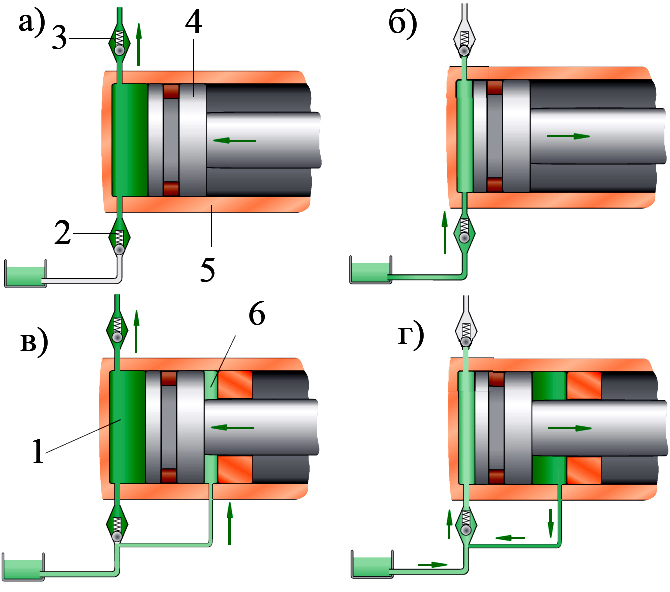
В одноступенчатом насосе обратной подачи АБС (рис. 13.17, а, б) весь цикловой объем тормозной жидкости засасывается, и соответственно протекает через трубопроводы, за один ход поршня (из ВМТ в НМТ). Необходимое для этого разряжение всасывания достаточно высоко и возрастает с ростом вязкости тормозной жидкости при низких температурах. Вследствие этого возникает кавитация и связанные с ней потери в производительности насоса.
В двухступенчатом насосе обратной подачи АБС (рис. 13.17, в, г) пространство за поршнем образует вторую рабочую камеру. Засасывание тормозной жидкости осуществляется в два приема и происходит как во время прямого, так и обратного хода поршня, что увеличивает вдвое объем засасываемой жидкости. Таким образом весь цикловой объем засасываемой жидкости протекает через трубопровод непрерывно и необходимое для обеспечения этого разряжение засасывания оказывается ниже, что предотвращает появление кавитации.
Работа системы АБС Bosch 2S происходит по программе, подразделяющейся на три фазы: 1 – нормальное или обычное торможение; 2 – удержание давления на постоянном уровне; 3 – сброс давления.
Фаза нормального торможения (рис. 13.18, а). При обычном торможении напряжение на электромагнитных клапанах отсутствует, из главного цилиндра тормозная жидкость под давлением свободно проходит через открытые электромагнитные клапаны и приводит в действие тормозные механизмы колес. Гидронасос не работает. Скорость колеса продолжает снижаться до тех пор, пока блок управления ABS не обнаружит начало блокировки колеса по сигналу, полученному от датчика скорости колеса.
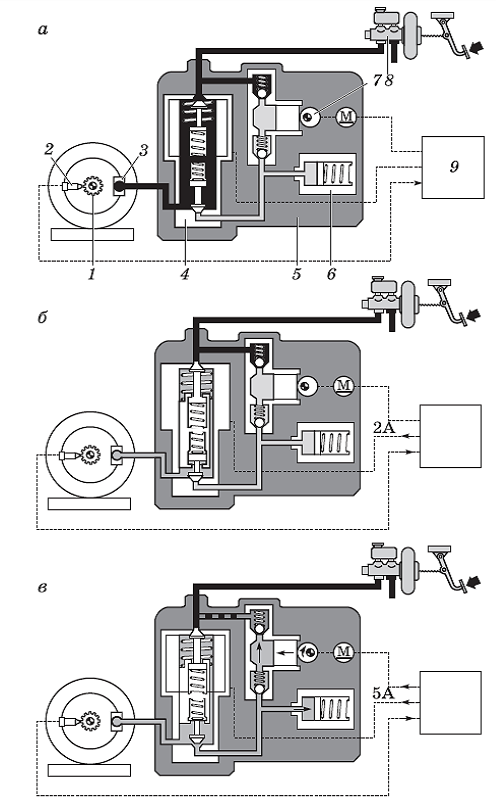
а) фаза нормального торможения; б) фаза удержания давления на постоянном уровне; в) фаза сброса давления; 1 – ротор колесного датчика; 2 – колесный датчик; 3 – колесный (рабочий) цилиндр; 4 – электрогидравлический модулятор; 5 – электромагнитный клапан; 6 – аккумулятор давления; 7 – нагнетательный насос; 8 – главный тормозной цилиндр; 9 – блок управления
Фаза удержания давления на постоянном уровне (рис. 13.18, б). При появлении признаков блокировки одного из колес БУ, получив соответствующий сигнал от колесного датчика, переходит к выполнению программы цикла удержания давления на постоянном уровне путем разъединения главного и соответствующего колесного цилиндра. На обмотку электромагнитного клапана подается ток силой 2 А. Поршень клапана перемещается и перекрывает поступление тормозной жидкости из главного цилиндра. Давление в рабочем цилиндре колеса остается неизменным, даже если водитель продолжает нажимать на педаль тормоза.
Фаза сброса давления (рис. 13.18, в). Если опасность блокировки колеса сохраняется, БУ подает на обмотку электромагнитного клапана ток большей сипы: 5 А. В результате дополнительного перемещения поршня клапана открывается канал, через который тормозная жидкость сбрасывается в аккумулятор давления жидкости. Давление в колесном цилиндре падает. БУ выдает команду на включение гидронасоса, который отводит часть жидкости из аккумулятора давления. Педаль тормоза приподнимается, что ощущается по биению тормозной педали.
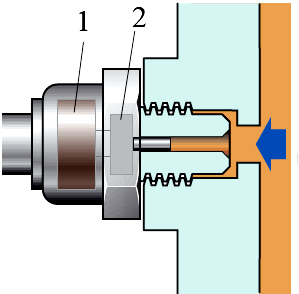
В качестве датчиков частоты вращения колес в системе АБС применяются пассивные (рис. 13.19) и активные индуктивные колесные датчики.
Пассивные датчики работают без собственного электропитания, чем и объясняется их название. Как правило, в таких датчиках используется индуктивный чувствительный элемент. Для любого измерения частоты вращения необходимы два элемента: чувствительный и задающий. Чувствительный элемент датчика 4 выполнен в виде катушки 1 с железным сердечником (магнитопроводом) и соприкасающимся с ним постоянным магнитом 2. Задающий элемент 5 представляет собой кольцо с зубьями (задающее кольцо или ротор). Наряду с датчиками ускорения ESP, датчики частоты вращения сообщают системе основную информацию, необходимую для её работы.
Принцип работы. Любой железный объект, проходя через магнитное поле датчика, изменяет форму и напряжённость этого поля. В результате изменения магнитного поля в катушке датчика, в соответствии с законом электромагнитной индукции, возникает ЭДС, измерение которой позволяет зафиксировать факт изменения магнитного поля. От принципа работы происходит и название датчиков этого типа — индуктивные. Прохождение через магнитное поле датчика каждого из зубьев задающего ротора индуцирует, таким образом, напряжение в цепи катушки датчика. Подсчёт числа импульсов напряжения за определённый интервал времени (частота) позволяет системе рассчитать частоту вращения или скорость колеса. Преимуществом пассивных индукционных датчиков частоты вращения является простота их конструкции. Недостаток же заключается в том, что для их работы необходимо с высокой точностью обеспечить определённый зазор между задающим ротором и датчиком.
Датчики могут крепиться на валу привода колеса, на валу привода конических шестерен для заднеприводных моделей автомобиля, на поворотных цапфах (рис. 13.20, а) и внутри ступицы колеса (рис. 13.20, б).
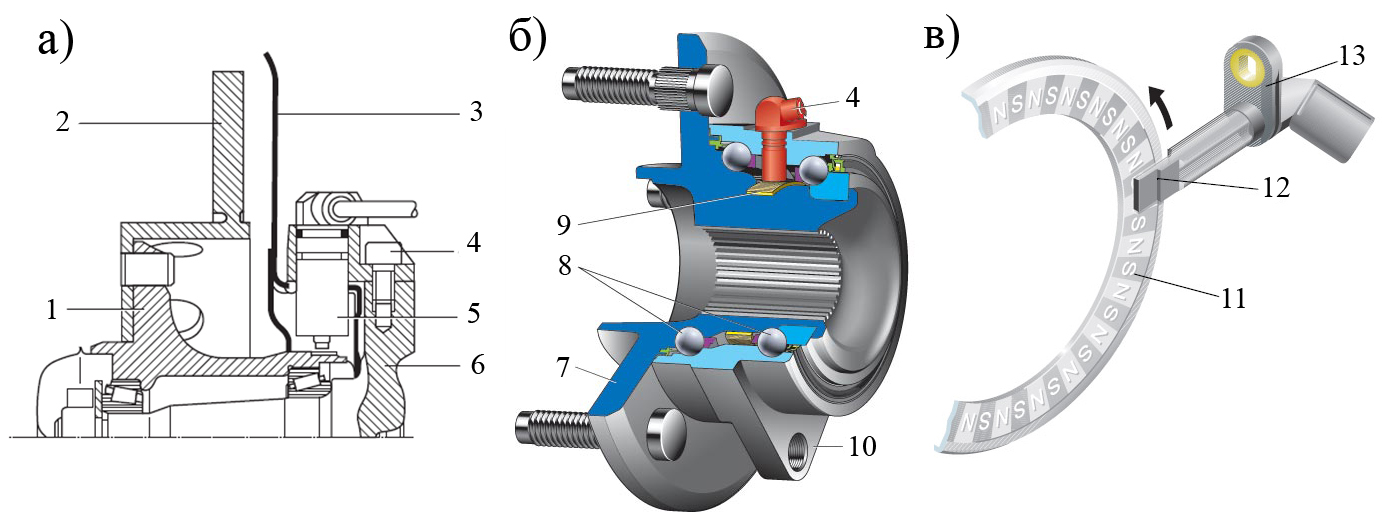
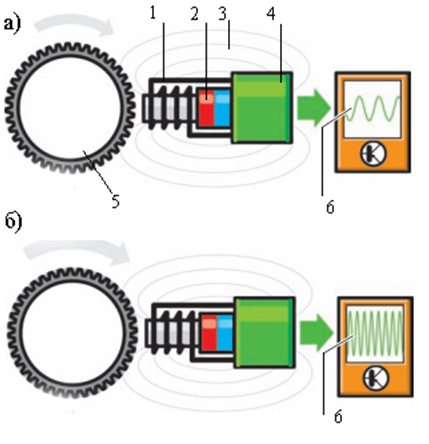
Более совершенны активные датчики, применяемые для измерения частоты вращения колеса (рис. 13.20, в). Чувствительный элемент электронной ячейки 12 такого датчика изготовлен из материала, электропроводность которого зависит от напряженности магнитного поля. При вращении задающего диска 11 происходят изменения магнитного поля. Вызываемые изменяющимся магнитным полем колебания, проходящего через чувствительный элемент тока преобразуются в электронной схеме в колебания напряжения, выводимого на внешние контакты датчика. При вращении задающего диска установленный около него датчик вырабатывает прямоугольные импульсы, частота которых соответствует частоте вращения диска. Преимуществом данного датчика по сравнению с ранее применяемыми системами является точная регистрация частоты вращения при ее снижении вплоть до остановки колеса.
Датчик давления в тормозной системе крепится к гидравлическому блоку и служит для определения и передачи в ЭБУ значения давления в тормозной системе при торможении. По полученному значению блок управления рассчитывает тормозные усилия на колесах и продольную силу, действующую на автомобиль. При необходимости выполнения управляющего цикла полученное значение используется блоком управления для расчета сил, действующих на автомобиль в повороте.
Основными компонентами датчика являются пьезоэлектрический элемент 2, находящийся под давлением тормозной жидкости, и электронная часть 1 (рис. 13.21).
Под действием давления тормозной жидкости распределение заряда в пьезоэлектрическом элементе меняется, и величина напряжения зависит от давления в тормозной системе.
В качестве датчика давления жидкости в тормозной системе может использоваться также емкостной датчик (рис. 13.22).
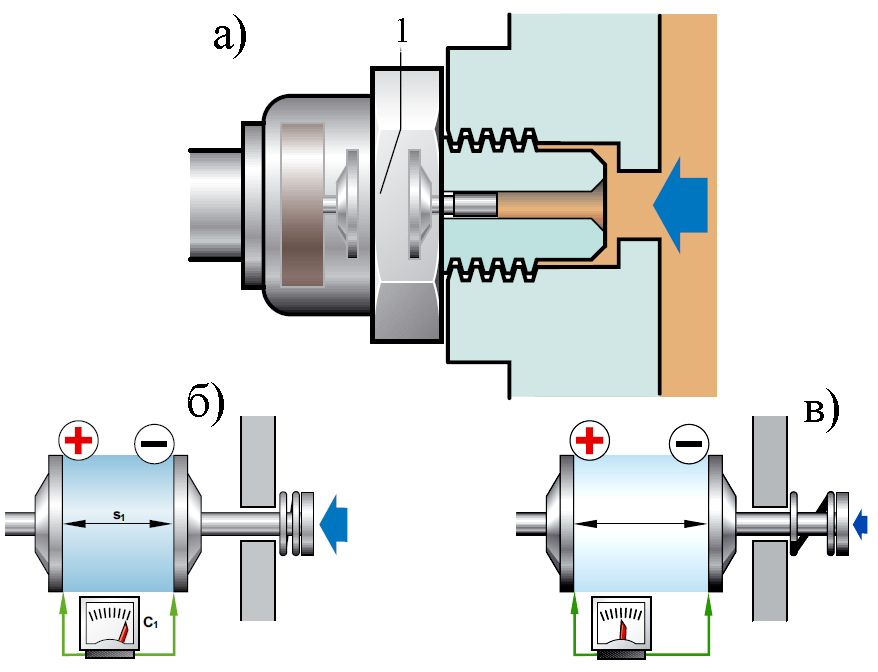
Конденсатор обладает способностью накапливать и удерживать определенный электрический заряд. Расстояние s между двумя пластинами обеспечивает некоторую емкость конденсатора C. Одна из пластин является неподвижной. Вторая пластина может перемещаться под воздействием давления, производимого тормозной жидкостью.
При воздействии давления на подвижную пластину расстояние между двумя пластинами уменьшается и становится равным s1, а емкость конденсатора при этом увеличивается и становится равной C1.
В случае понижения давления пластина отходит обратно под действием пружины. Емкость конденсатора снова уменьшается. Следовательно, изменение емкости прямо связано с изменением давления.
Датчик положения педали тормоза закреплен на главном тормозном цилиндре (рис. 13.23). Он определяет, нажата ли педаль тормоза. Блок управления бортовой сети включает стоп-сигналы. Помимо этого, блок управления двигателя предотвращает ускорение автомобиля при одновременном нажатии педалей тормоза и акселератора. Это необходимо для снижения подачи топлива или изменения момент зажигания или положения дроссельной заслонки.
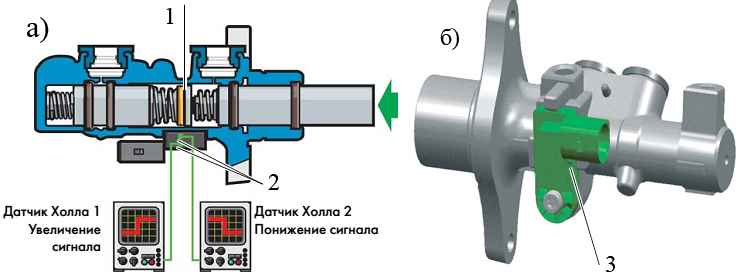
При нажатии педали тормоза шток в главном тормозном цилиндре перемещает поршень с кольцевым магнитом (постоянный магнит). Из соображений надежности в датчике положения педали тормоза устанавливаются 2 датчика Холла.
Если педаль тормоза не нажата, то поршень с кольцевым магнитом находится в положении покоя. Блок предварительной обработки результатов датчика положения педали тормоза посылает на блок управления двигателя и блок управления бортовой сети сигнал 2 В. Этот сигнал означает, что педаль не нажата.
При нажатии педали тормоза шток перемещает поршень. Как только кольцевой магнитопровод поршня переходит точку срабатывания датчика Холла, блок предварительной обработки результатов посылает сигнал напряжения, величина которого на 2 В меньше напряжения в бортовой сети, на блок управления двигателя. Этот сигнал означает, что педаль нажата.
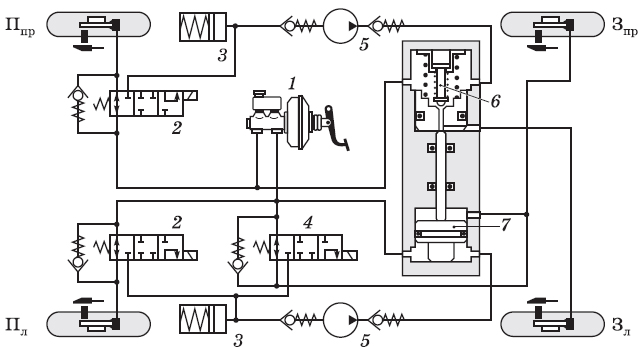
Принцип работы аналогичный АБС 2S, применяется и для АБС 2Е фирмы Bosch (рис. 13.24), однако в этой системе применяется уравнивающий цилиндр для уравнивания давления в тормозном приводе задних колес, который позволяет вместо четырех электромагнитных клапанов применять три клапана. В состав модулятора входят таким образом не четыре, а три электромагнитных клапана, уравнивающий цилиндр, двухпоршневой нагнетательный гидронасос, два аккумулятора давления, реле насоса и реле электромагнитных клапанов.
Система работает следующим образом. При обычном торможении тормозная жидкость под давлением из главного цилиндра поступает в рабочие цилиндры обоих передних колес и правого заднего колеса через три электромагнитных клапана, которые в исходном положении закрыты. В рабочий цилиндр левого заднего колеса тормозная жидкость подается через открытый перепускной клапан уравнивающего цилиндра. Когда возникает опасность блокировки одного из передних колес, БУ выдает команду на закрытие соответствующего электромагнитного клапана, предотвращая повышение давления в колесном цилиндре. Если опасность блокировки колеса не устранена, к электромагнитному клапану подводится ток, обеспечивающий открытие участка магистрали между рабочим цилиндром колеса и аккумулятором давления. Давление в приводе тормоза падает, после чего БУ выдает команду на включение гидронасоса, который перегоняет жидкость в главный цилиндр через уравнивающий цилиндр.
Когда возникает опасность блокировки одного из задних колес, давление тормозной жидкости будет регулироваться в обоих задних тормозах одновременно, с тем чтобы не допустить движения задних колес юзом.
Электромагнитный клапан привода правого заднего тормоза устанавливается в положение удержания постоянного давления и перекрывает участок магистрали между главным цилиндром и колесным цилиндром. На противоположные торцевые поверхности поршня 7 уравнивающего цилиндра начинает действовать давление различной величины, вследствие чего поршень со штоком переместится в сторону наименьшего давления (на рисунке – вверх) и закроет клапан 6, разъединив главный цилиндр и колесный цилиндр левого заднего тормоза. Поршень уравнивающего цилиндра из-за образующейся разницы давления в рабочих полостях над ним и под ним всякий раз устанавливается в такое положение, при котором давление в приводах обоих задних тормозов одинаково.
Если сохраняется опасность блокировки задних колес, БУ запитывает электромагнитный клапан в контуре задних колес током в 5 А. Золотник электромагнитного клапана перемещается и открывает участок контура между рабочим цилиндром правого заднего тормоза и аккумулятором давления жидкости. Давление в контуре уменьшается. Гидронасос нагнетает тормозную жидкость в главный цилиндр через уравнивающий цилиндр. В результате снижения давления в пространстве над поршнем 7 происходит очередное его перемещение, сжимается пружина центрального клапана, увеличивается объем пространства под верхним поршнем. Давление в левом колесном тормозном цилиндре снижается. Поршень уравнивающего цилиндра вновь устанавливается в положение, соответствующее равенству давлений в приводах обоих задних тормозов. После устранения угрозы блокировки колес электромагнитный клапан возвращается в исходное положение. Поршень уравнивающего цилиндра под действием пружины также занимает исходное нижнее положение.
Более совершенной является АБС 5-й серии фирмы Bosch с блоком 10, которая относится к новому поколению систем АБС, представляя собой замкнутую гидравлическую систему, не имеющую канала для возврата тормозной жидкости в бачок, питающий главный тормозной цилиндр. Схема этой системы показана на примере автомобиля Volvo S40 (рис. 13.25).
Электронные и гидравлические компоненты смонтированы как единый узел. В их число входят, кроме указанных в схеме: реле для включения электродвигателя плунжерного насоса 5 и реле включения впускных 12 и выпускных 11 клапанов. Внешними компонентами являются: сигнальная лампа работы АБС в приборной панели, которая загорается в случае возникновения неисправности в системе, а также при включении зажигания в течение четырех секунд; выключатель стоп-сигнала и датчики скорости вращения колес. Блок имеет вывод на диагностический разъем.
Дросселирующий клапан 13 устанавливается для снижения тормозного усилия на задних колесах с целью избежания их блокировки. В связи с тем, что тормозная система имеет настройку по более «слабому» заднему колесу (это означает, что давление тормозов задних колес одинаковое, а его величина устанавливается по наиболее близкому к блокированию колесу), дросселирующий клапан устанавливается один на контур.
Тормозные механизмы 14-17 включают тормозные диски и однопоршневые суппорты с плавающей скобой и тормозными колодками, оборудованными скобами контроля износа фрикционных накладок. Тормозные механизмы задних колес аналогичны передним, но имеют сплошные тормозные диски (на передних — вентилируемые) и исполнительный механизм стояночного тормоза, вмонтированный в суппорт.
При нажатии педали 7 тормоза ее рычаг освобождает кнопку выключателя стоп-сигнала, который, срабатывая, включает лампочки стоп-сигналов и приводит АБС в дежурное состояние. Движение педали через шток и вакуумный усилитель 8 передается на поршни главного цилиндра 9. Центральный клапан во вторичном поршне, и манжета первичного поршня перекрывают сообщение контуров с бачком 6 для тормозной жидкости. Это приводит к росту давления в тормозных контурах. Оно действует на поршни тормозных цилиндров в тормозных суппортах. В результате этого тормозные колодки прижимаются к дискам. При отпускании педали все детали возвращаются в исходное положение.
Если при торможении одно из колес близко к блокировке (о чем сообщает датчик частоты вращения), блок управления перекрывает впускной клапан 12 соответствующего контура, что препятствует дальнейшему росту давления в контуре независимо от роста давления в главном цилиндре. В то же время начинает работать гидравлический плунжерный насос 5. Если вращение колеса продолжает замедляться, блок управления открывает выпускной клапан 11, позволяя тормозной жидкости возвратиться в гидроаккумуляторы 3. Это приводит к уменьшению давления в контуре и позволяет колесу вращаться быстрее. Если вращение колеса чрезмерно ускоряется (по сравнению с другими колесами) для повышения давления в контуре блок управления перекрывает выпускной клапан 11 и открывает впускной 12. Тормозная жидкость подается из главного тормозного цилиндра и с помощью плунжерного насоса 5 из гидроаккумуляторов 3. Демпферные камеры 4 сглаживают (подавляют) пульсации, возникающие в системе при работе плунжерного насоса.
Выключатель стоп-сигнала информирует модуль управления о торможении. Это позволяет модулю управления более точно контролировать параметры вращения колес.
Диагностический разъем служит для подсоединения Volvo System Tester при выполнении диагностики.
Если автомобиль оборудован системой DSA (система динамической стабилизации), то модуль управления системой DSA получает данные о частоте вращения колес, которые необходимы для измерения пробуксовывания. Эту информацию модуль управления системой DSA получает с модуля управления системой АБС. Для этой цели служат три коммуникационные линии. Система DSA не использует тормоза для контроля пробуксовывания.
При включении зажигания система проверяет электрическое сопротивление всех компонентов. Во время этой проверки горит сигнальная лампа. После завершения проверки (4 с) лампа должна погаснуть. Она также загорается, если одно из колес пробуксовывает более 20 секунд или если электроснабжение выдает напряжение менее 10 вольт. Контрольная лампочка системы предупреждает водителя о том, что из-за неисправности системы произошло ее автоматическое отключение, при этом однако тормозная система продолжает функционировать как обычная тормозная система без АБС.
При движении автомобиля выполняется проверка электродвигателя насоса, его реле, впускных и выпускных клапанов на скорости 6 км/ч. На скорости 40 км/ч осуществляется проверка работы колесных датчиков. Во время работы системы насос функционирует в непрерывном режиме.
Во время движения в дождь или снегопад при скорости движения более 70 км/час и включенном стеклоочистителе лобового стекла тормозные накладки передних тормозов периодически (каждые 185 секунд) кратковременно (на 2,5 секунды) прижимаются к тормозным дискам с минимальным давлением (0,5…1,5 кгс/см2). В результате этого накладки и диски очищаются, и улучшается эффективность торможения.
Расширенная антиблокировочная система ABSplus. Система ABSplus представляет собой программное расширение в блоке управления ABS/ESP. Система ABSplus позволяет на дороге без твёрдого покрытия (например, щебень или песок) достичь сокращения тормозного пути на величину до 20%. ABSplus использует датчики системы ESP.
На основании данных датчиков ABS и блока управления ABS система распознаёт характер дорожного покрытия. Сокращение тормозного пути достигается за счёт кратковременного, контролируемого блокирования колёс. При этом перед заблокированными колёсами образуется «буртик» (рис. 13.26) из материала дорожного покрытия, который оказывает тормозящее воздействие и тем самым укорачивает тормозной путь. Через определённые промежутки времени колёса периодически деблокируются и начинают вращаться, в результате чего сохраняется управляемость автомобиля.
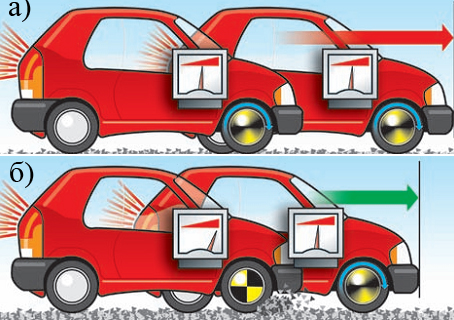
На автомобиле без ABSplus торможение на дороге без твёрдого покрытия происходит так же, как и на дороге с твёрдым покрытием.
Недостатком системы ABS является то, что на рыхлой поверхности (песок, гравий, снег) применение антиблокировочной системы увеличивает тормозной путь. На таком покрытии наименьший тормозной путь обеспечивается как раз при заблокированных колесах. При этом, перед каждым колесом формируется клин из грунта, который и приводит к сокращению тормозного пути. В современных конструкциях ABS этот недостаток устранен — система автоматически определяет характер поверхности и для каждой реализует свой алгоритм торможения (расширенная антиблокировочная система ABSplus).
На автомобиле с ABSplus при торможении на дороге без твёрдого покрытия колёса периодически кратковременно блокируются, так что перед ними образуется буртик из материала покрытия. В результате тормозной путь сокращается.
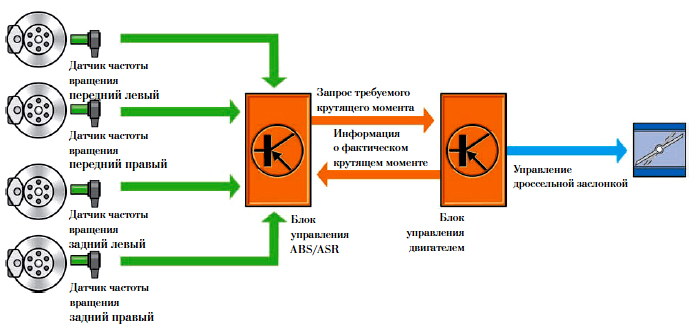
Антиблокировочная функция, реализуемая с помощью управления двигателем (M-ABS).
Функция M-ABS дополняет систему ABS возможностью управления работой двигателя. Возможность самостоятельного создания тормозного давления у неё отсутствует. В её составе нет компонентов, необходимых для создания тормозного давления с помощью насоса обратной подачи самостоятельно, без участия водителя.
На основании данных от датчиков скорости колёс и данных о работе двигателя, получаемых по шине CAN, система ABS устанавливает наличие опасности проскальзывания ведущих колёс, функция M-ABS направляет блоку управления двигателя запрос на прикрытие дроссельной заслонки и, таким образом, снижение передаваемого к колёсам крутящего момента (рис. 13.27).
Таким образом, можно сформулировать следующие качества обеспечения безопасности движения при применении штатной ABS в ТС.
— ABS обеспечивает эффективное торможение особенно на дорогах с мокрым и скользким состоянием покрытия и уменьшить тормозной путь при экстренном торможении до 40%;
— обеспечивает большую устойчивость ТС в процессе торможения путем использования лучших сцепных свойств с дорогой при удержании колеса от скольжения колеса в боковом направлении;
— наличие системы позволяет увеличивать среднюю скорость движения до 15% благодаря большей уверенности водителя при вождении ТС с ABS;
— уменьшается износ шин благодаря исключению юза колеса при экстренном торможении с ABS:
— применяемые в ABS функциональные комплекты используются для работы других систем управления движения ТС.